|






 |  |

| Afaceri | Agricultura | Comunicare | Constructii | Contabilitate | Contracte |
| Economie | Finante | Management | Marketing | Transporturi |
Electrica
|
|
Qdidactic » bani & cariera » constructii » electrica Tipuri de sisteme de reglare automata |
Tipuri de sisteme de reglare automata
TIPURI DE SISTEME DE REGLARE AUTOMATA
1. SISTEME DE REGLARE AUTOMATA DE NIVEL
In numeroase cazuri de reglare a nivelului nu se cere o mare precizie a reglarii: este suficient, de exemplu, sa se mentina nivelul cu o precizie de cativa centimetri pentru o inaltime totala de cativa decimetri. S-ar putea trage concluzia ca un regulator bipozitional ar fi suficient si in practica deseori o asemenea dotare este satisfacatoare. Trebuie totusi analizate mai indeaproape instalatiile tehnologice pentru ca, de exemplu, reglarea nivelului intr-un rezervor de suprafata orizontala mica in care debitele de intrare si iesire sunt mari este o problema mult mai dificila decat reglarea cu aceiasi precizie a nivelului intr-un rezervor de mare capacitate in raport cu debitul care il traverseaza. In asemenea situatii, cu o toleranta acceptata in ce priveste nivelul reglat, se recomanda un regulator continuu de tip P.
Sistem bipozitional de reglare
a nivelului lichidului intr-un rezervor
Sa presupunem ca apare un debit de pierderi Qp; nivelul lichidului coboara; ca atare, plutitorul si contactul mobil C1 coboara. In momentul in care C1 atinge contactul fix C2, in circuitul electric se asigura alimentarea bobinei contactorului R. Contactele R se inchid si motorul asincron M este cuplat la retea, antrenand pompa P. Aceasta trimite un debit de lichid Qa (presupus mai mare decat Qp) in rezervor, nivelul lichidului creste, contactul C1,2 se deschide si pompa isi inceteaza actiunea. Daca debitul Qp se mentine, fenomenele se repeta. Nivelul se modifica deci permanent in jurul valorii prescrise (prescrierea se face deplasand pe verticala contactul C2).
Caracteristici generale ale reglarii bipozitionale, indiferent de marimea reglata :
- reglarea bipozitionala este mai simpla din punct de vedere constructiv decat cea continua si deci mai economica;
- performantele realizate cu o reglare bipozitionala sant mai slabe decat cele obtinute cu un reglaj continuu, avand in vedere ca marimea de iesire nu se mentine constanta, ci variaza intre anumite limite in jurul valorii prescrise;
- atunci cand nu se impun precizii prea ridicate, este indicat sa se adopte un reglaj bipozitional.
SISTEME DE REGLARE IN CASCADA, PENTRU TEMPERATURA
Sistemele de reglare in cascada sunt des intalnite in practica in reglarile de temperatura, atunci cand trebuie evitate atat abateri mari ale parametrului reglat fata de marimea de referinta, cat si regimuri tranzitorii lungi.
|
Sistem de reglare in cascada a temperaturii intr-un cuptor
Valoarea masurata a temperaturii de catre traductorul T este transmisa regulatorului de temperatura R1. Intr-un circuit de reglare simplu, marimea de iesire a regulatorului R1 s-ar transmite direct robinetului de reglare V, care modifica debitul de combustibil.
La un astfel de sistem de reglare simpla apare urmatorul neajuns; la o modificare a presiunii pe conducta de alimentare cu combustibil, aceasta ar provoca o schimbare a debitului de combustibil patruns in arzator, fara ca robinetul V sa-si fi schimbat pozitia. Se produce astfel o modificare a temperaturii in cuptor; modificarea de temperatura este sesizata si corectata de bucla de reglare a temperaturii, prin schimbarea pozitiei robinetului V, dar aceasta corectie se produce cu mare intarziere, din cauza inertiei termice mari a cuptorului.
Corectia se poate face mult mai rapid daca se introduce o bucla secundara de reglare a debitului. In acest scop se introduce traductorul de debit F si regulatorul de debit R2, care primeste ca marime prescrisa marimea de iesire din R1. In felul acesta, orice modificare nedorita a debitului este rapid corectata de bucla interna de reglare a debitului. Se observa ca debitul este mentinut la valoarea prescrisa de regulatorul de temperatura, valoare care asigura realizarea valorii dorite a temperaturii.
Avantajele reglarii in cascada
Din exemplul prezentat se desprind cateva aspecte generale legate de reglarile de acest tip. Se masoara mai multe marimi din sistem (doua sau mai multe), fiecare marime masurata fiind transmisa la cate un regulator; regulatoarele se monteaza in cascada (unul dupa altul), astfel ca iesirea dintr-un regulator sa constituie marime de prescriere pentru urmatorul. Se formeaza de fapt mai multe bucle de reglare, interioare una alteia. Buclele se aranjeaza astfel incat cea exterioara sa corespunda marimii reglate, iar spre interior sa fie din ce in ce mai rapide (sa aiba constante de timp mai mici). Din aceasta aranjare decurge si o comportare mai buna a sistemelor de reglare in cascada si anume: efectul unei perturbatii care apare intr-o bucla interioara este rapid anihilat de catre bucla respectiva si se resimte in mica masura in buclele exterioare si deci afecteaza putin marimea reglata.
Acordarea regulatoarelor
Acordarea regulatoarelor din sistemele de reglare in cascada se face dupa aceleasi criterii ca si la reglarile simple. Se porneste de la bucla interioara, care se acordeaza independent de restul sistemului. Odata efectuata aceasta operatie, bucla interioara apare ca parte fixata in cea exterioara, in care urmeaza sa se aleaga si sa se acordeze regulatorul.
3. SISTEME DE REGLARE AUTOMATA DE URMARIRE
Un sistem de urmarire este acel sistem la care marimea de iesire e trebuie sa fie egala (sa urmareasca ) cu marimea de intrare i, care are o variatie intamplatoare. Astfel de sisteme se utilizeaza la carma navelor, la dirijarea avioanelor, a antenelor de radiolocatie, la pozitionarea unor piese la unele masini-unelte etc. In figura de mai jos se da schema unui astfel de sistem. Cu linii pline s-au figurat legaturile electrice, iar cu linie punct cele mecanice.
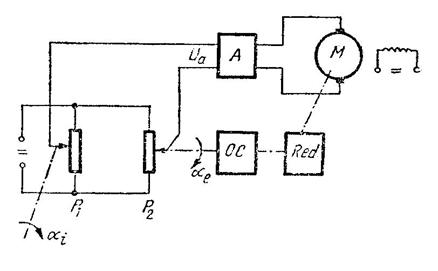
Axul comandat al obiectului comandat OC trebuie sa execute aceeasi deplasare unghiularae ca si deplasarea axului de comanda, Pe cele doua axe sunt plasate cursoarele unor potentiometre identice, P1 si P Cat timp axele si deci si cursoarele ocupa pozitii identice, tensiunea culeasa intre cursoare este nula si sistemul este in repaus. Daca axul de comanda isi schimba pozitia, apare o tensiune Ua care este amplificata de amplificatorul A, rezultand tensiunea Um, care se aplica la bornele motorului de curent continuu M. Acesta incepe sa se roteasca, deplasand - prin intermediul reductorului Red obiectul comandat OC. Legatura dintre axul comandat si potentiometrul P2 care constituie tocmai legatura de reactie a sistemului asigura modificarea pozitiei cursorului potentiometrului P2, astfel ca atunci cande devine egal cu i Ua=0 si sistemul se opreste.
De remarcat ca punctele de comanda si cel comandat pot fi la distanta oricat de mare intre ele, trebuind doar sa se asigure legaturile electrice. In timp ce cuplul necesar deplasarii axului de comanda este mic, cuplul realizabil la axul comandat poate fi foarte mare, functie de puterea motorului M.
La unele procese tehnologice se impune ca marimea de iesire sa varieze dupa o anumita lege (de exemplu, la tratamentele termice, se impune modificarea temperaturii dupa o curba prescrisa). Aceasta se poate obtine cu un sistem de reglare obisnuit, la care se impune o variatie corespunzatoare pentru marimea de intrare si care trebuie urmarita de marimea de iesire. Aceste sisteme se deosebesc de sistemele de urmarire descrise mai sus prin aceea ca marimea de intrare nu variaza intamplator, ci dupa un anumit program. Pentru a le distinge, aceste sisteme se numesc de reglare dupa program.
BIBLIOGRAFIE
|
1. Nastase Bichir Sabina Hilohi |
|
Masini, aparate, actionari, automatizari |
|
2. N.V. Balan C. BalanI. Papadache |
|
Actionari si automatizari |
|
3. * |
|
Automatizari industriale |
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |