|






 |  |

| Afaceri | Agricultura | Comunicare | Constructii | Contabilitate | Contracte |
| Economie | Finante | Management | Marketing | Transporturi |
Electrica
|
|
Qdidactic » bani & cariera » constructii » electrica Senzori si traductoare |
Senzori si traductoare
SENZORI SI TRADUCTOARE
Disciplina de Senzori si Traductoare ofera studentilor, de la profilurile electrice, cunostintele necesare intelegerii principiilor de functionare si modului de realizare constructiva pentru cele mai utilizate traductoare in cadrul sistemelor de reglare (sau conducere) a proceselor industriale.
Usurinta asimilarii continutului acestui curs, completat cu lucrarile practice de laborator, este conditionata de pregatirea anterioara a studentilor la disciplinele: Fizica, Bazele Electrotehnicii, Masurari Electrice si Electronica.
Intrucat aceasta disciplina (Senzori si Traductoare) este precedata si logic conectata de Masurarile Electrice, in cele ce urmeaza se vor reaminti cateva notiuni generale referitoare la:
Procesul de masurare
Importanta masurarilor in tehnica
Unitatile de masura.
a) Procesul de masurare
A masura inseamna a compara o marime necunoscuta (X) cu o alta de aceeasi natura (x) luata drept unitate, dupa relatia:
X = mx (i .1)
in care m reprezinta valoarea marimii necunoscute (X). Aceasta comparare este efectuata, de regula, de catre un aparat de masura ce are memorata unitatea de masura, in interior, pe scara gradata.
Marimea de masurat (X) se mai numeste si masurand.
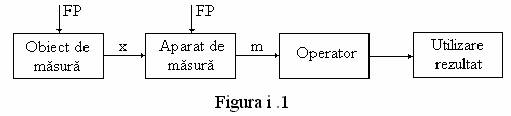
Indicatia aparatului de masura (valoarea m) este perceputa de catre un operator (uman sau automat), iar acest rezultat al masurarii este transmis mai departe pentru a fi utilizat in practica (fig. i .1).
Schema bloc din figura i.1 sugereaza ca procesul de masurare poate fi considerat ca o interfata intre obiectul de masura si domeniul de utilizare a rezultatului masurarii (control, verificare experimentala a unei teorii etc).
Din cauza imperfectiunii aparatului de masurat (AM) si a operatorului, precum si datorita prezentei unor factori perturbatori (FP), rezultatul masurarii este intotdeauna afectat de o eroare, iar nivelul acesteia defineste calitatea de baza a unei masurari: precizia; cu cat eroarea este mai mica, cu atat precizia este mai buna. Rezultatul unei masurari nu prezinta nici o importanta practica daca nu se cunoaste si precizia acestuia.
Pentru micsorarea erorilor si deci cresterea preciziei de masurare, trebuie, in primul rand, eliminati sau mentinuti la nivele constante, controlabile, toti factorii perturbatori (FP) cum sunt factorii de clima (temperatura, umiditatea, presiunea), campurile electrice, magnetice si electromagnetice.
In afara de acestea mai trebuie precizate si conditiile tehnice de definire a marimii X. De exemplu, daca la masurarea pierderilor in fier rezulta 2W/kg aceasta cifra nu este concludenta daca nu se specifica si valoarea inductiei magnetice, respectiv frecventa la care au fost masurate.
Ca regula generala se recomanda ca obiectele sa fie masurate in conditiile lor normale de lucru, sau cat mai apropiate de acestea.
Cu privire la aparatul de masura si la operator este necesar sa se observe urmatoarele:
Aparatul de masura (AM) trebuie sa fie cat mai adecvat scopului urmarit, iar o alegere judicioasa cere cunoasterea performantelor si limitelor aparatului respectiv in conditiile reale de lucru. Principalul parametru de calitate al unui AM este precizia; aceasta precizie trebuie verificata, de regula, inaintea operatiei de masurare, mai ales cand se fac masurari de mare raspundere, fara a acorda credit suta la suta indicatiilor din prospectul aparatului.
Operatorul uman Cel mai solicitat simt al acestuia este vazul, iar in cazul masuratorilor acustice se adauga si auzul. In legatura cu aceste doua simturi se cunosc urmatoarele
-Exista un prag minim de sensibilitate sub care doua stari vecine nu mai pot fi deosebite una de alta, prag care defineste rezolutia operatorului;
-Senzatia depinde logaritmic de excitatie (legea Webwe-Fechner). Pentru a tine seama de aceasta particularitate, unele aparate de masura utilizate in electroacustica si in telecomunicatii au scara logaritmica, gradata in decibeli (dB);
-Acuitatea vizuala si cea acustica se imbunatatesc prin antrenament;
-Atat acuitatea vizuala cat si cea acustica scad rapid la cresterea gradului de oboseala.
In cazul utilizarii operatorului automat este necesar ca aparatul de masura sa poata vorbi in limbajul acestuia. De exemplu, daca operatorul este un calculator de proces, aparatul trebuie sa furnizeze informatia in codul acestuia. In figura i.2-a este data schema de principiu a unui lant de masura.
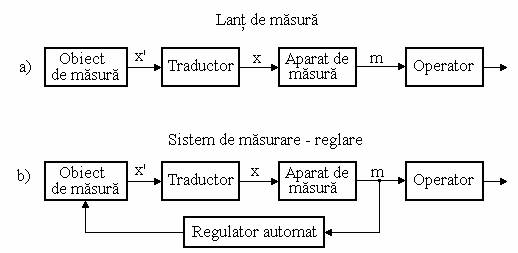
Figura i .2
Observatii
1. Cand masurandul este o marimne neelectrica (de exemplu, temperatura), intre OM si AM se interpune un dispozitiv care sa-l converteasca intr-o marime electrica X (de exemplu, o tensiune); un asemenea dispozitiv (termocuplu in cazul citat) se numeste traductor (figura i.2-a).
2. In cazul marimilor neelectrice este necesar, adesea, nu numai masurarea ci si reglarea marimii respective cum ar fi, de exemplu, masurarea si reglarea temperaturii intr-un cuptor de tratamente termice. In acest caz, in schema de masurare (figura i.2-b) apare, in plus, un organ de decizie si actiune (regulator automat de temperatura in cazul citat).
b) Importanta masurarilor in stiinta si tehnica
Baza oricarei inginerii este proiectarea, iar proiectarea se sprijina pe date obtinute prin operatii de masurare. Atat in stiinta, cat si in tehnica informatiile necesare sunt obtinute, in principal, prin masurari.
Inca la finele secolului trecut, W.Thomson arata ca: Istoria fizicii este in esenta istoria evolutiei mijloacelor de masura deoarece un fenomen fizic nu poate fi inteles si utilizat in practica pana nu e masurat. Fizica este stiinta care masoara realitatea.
In prezent, traim intr-o lume a masuratorilor; in nici un domeniu al activitatilor umane (stiinta, cercetare, productie) nu se poate progresa fara operatii de masurare. Dintre stiintele tehnice, electronica este cea mai dependenta de tehnica masurarilor. In acelasi timp, evolutia remarcabila a aparatelor de masura electronice se datoreaza progreselor realizate in domeniul dispozitivelor si circuitelor electronice, a tehnicilor numerice de conditionare si prelucrare a semnalelor. AM electronice s-au raspandit atat de mult in toate sferele de activitate, incat azi nu e posibil ca cineva sa pretinda ca are o cultura tehnica generala fara a cunoaste cat de cat instrumentatia electronica de baza. In fine, afirmatia lui G.Keinath (specialistul care a dominat scena metrologica electrica intre anii 1930-1950): Mehr messen, mehr wissen (masuram mai mult, stim mai mult) pledeaza suficient de convingator in aceasta directie.
c) Unitati de masura
Dupa cum rezulta din (i.1), pentru efectuarea unei operatii de masurare este necesara si o unitate de masura. Odata cu cresterea numarului marimilor de masurat a aparut cerinta stabilirii unui grup de unitati care sa permita masurarea tuturor marimilor fizice cunoscute. Un asemenea grup se numeste sistem de unitati.
In trecutul fizicii au fost elaborate si folosite mai multe sisteme de unitati: CGS electrostatic, CGS electromagnetic si MIKSA. Aceasta din urma are la baza sistemul metric (metru, kilogram, secunda) adoptat in Franta inca din anul 1795 si a fost completat de catre italianul Giorgi, in anul 1936, cu o a patra unitate amperul. Tot Giorgi a propus si numele de MSKA (metru, secunda, kilogram, amper) pentru acest sistem de unitati.
In prezent tinde sa se generalizeze in intreaga lume, sistemul international de unitati SI. Acesta provine din MKSA rationalizat, la care au fost adaugate pe parcurs si alte trei unitati: gradul Kelvin (K) pentru temperatura, candela (cd) pentru intensitate luminoasa si molul (mol) pentru cantitatea de substanta. Pe plan international SI a fost adoptat in anul 1954, iar la noi in tara a fost legiferat in anul 1961, data la care a devenit obligatoriu. Totusi, alaturi de unitatile SI, atat la noi cat si in alte tari se mai utilizeaza si unitati din afara sistemului SI, denumite unitati tolerate (grad Celsius, Gauss, Oerstedt etc.)
Unitati fundamentale (SI)
Cele sapte unitati ale SI mentionate mai inainte se numesc unitati fundamentale pentru ca sunt stabilite independent una de alta, iar celelalte unitati deduse din primele, pe baza unor relatii cunoscute, se numesc unitati derivate.
Unitatile fundamentale au urmatoarele definitii:
1. Metrul (m) reprezinta distanta parcursa de lumina in vid, timp de 1/299792458 s (aprox. 3,3 ns). Aceasta definitie (care presupune viteza luminii in vid =299792458 m/s si nu 3 · 108 m/s) a fost adoptata in anul 1983 si inlocuieste pe cea bazata pe radiatia atomului de kripton 86 (mai putin precisa), adoptata in anul 1960. Pana atunci metrul era definit pe baza prototipului de platina iridata, adoptat in anul 1889 de catre Conferinta Generala de Masuri si Greutati (CGPM)3 si pastrat la Biroul International de Masuri si Greutati (BIPM)4 de la Sévres Paris; lungimea prototipului a fost stabilita ca fiind a zecea milioana parte din sfertul meridianului terestru.
2. Kilogramul (kg) reprezinta masa kilogramului international prototip din platina iridiata adoptat in anul 1889 de catre CGM si pastrat la BIMG Sévres.
3. Secunda (s) reprezinta durata a 9192631770 perioade ale radiatiei corespunzatoare tranzitiei intre cele doua nivele de energie hiperfine ale starii fundamentale a atomului de cesiu 133. Aceasta definitie a fost adoptata in anul 1967 la cea de a 13-a CGMG. Pana atunci s-a folosit secunda definita pe baza anului tropic 1900 (a se vedea si 2.5.3).
4. Amperul reprezinta intensitatea unui curent electric constant care, mentinut in doua conductoare paralele, rectilinii, cu lungimea infinita, asezate in vid la o distanta de 1 m unul de altul, ar produce intre aceste conductoare o forta de 2 . 10-7 N/m (0,2 µN/m). Aceasta definitie a fost adoptata de catre CGM in anul 1948. Pana atunci s-a folosit amperul definit pe baza fenomenului de electroliza: cantitatea de electricitate necesara depunerii a 0,118 mg de argint timp de o secunda.
|
5. Kelvinul (K) sau gradul Kelvin este unitatea de temperatura termodinamica si reprezinta 1/273,16 din temperatura termodinamica a punctului triplu al apei. A fost adoptat in anul 1967. Pana atunci, ca unitate de masura a temperaturii s-a folosit gradul Celsius (oC), unitate utilizata si in prezent.
Intre acestea doua exista relatia: T(K) = 273,16 + temperatura in oC
6. Candela (cd) reprezinta intensitatea luminoasa intr-o directie data, a unei surse care emite o radiatie monocromatica cu frecventa de 5,4 .1014 Hz (lungimea de unda 555 nm) si a carei intensitate energetica in aceasta directie este IR = 1/683 W/sr (=1,46 mW/sr). Aceasta definitie (radiometrica) a fost adoptata in anul 1979. Pana atunci s-a folosit definitia fotometrica (bazata pe corpul negru), mai dificila de materializat in practica decat prima.
7. Molul (mol) reprezinta cantitatea de substanta a unui sistem care contine atatea entitati elementare (atomi, molecule, ioni etc.) cati atomi exista in 0,012 kg de carbon 12 (6,02.1023 atomi); de exemplu, intr-un mol de apa exista 6,02.1023 molecule. Aceasta unitate se utilizeaza in Chimie si in Fizica moleculara.
Unitati derivate
Unitatile SI derivate, mai des utilizate in electronica, impreuna cu marimile respective sunt date in tabelul T.1.
Acestea au urmatoarele definitii:
Coulombul (C) este cantitatea de electricitate transportata de un curent de 1 A intr-o secunda.
Voltul (V) este diferenta de potential ce se stabileste intre doua puncte ale unui fir parcurs de catre un curent constant de 1 A, cand puterea disipata intre aceste doua puncte este egala cu 1 W.
Voltul pe metru (V/m) reprezinta gradientul de potential electric, care arata ca in acel camp electric uniform, intre doua puncte ale spatiului respectiv aflate la 1 m distanta unul de altul exista o diferenta de potential de 1 V.
Ohmul W) reprezinta rezistenta electrica existenta intre doua puncte ale unui fir conductor cand o diferenta de potential de 1V aplicata intre aceste doua puncte face sa circule prin acel conductor un curent de 1 A, conductorul respectiv nefiind sediul nici unei tensiuni electromotoare.
Faradul (F) este capacitatea unui condensator electric intre armaturile caruia apare tensiunea de 1V cand este incarcat cu 1 C.
Amperspira (A) este tensiunea magnetomotoare produsa de un curent cu intensitatea de 1 A la parcurgerea unei singure spire, intr-un circuit magnetic inchis.
Tabelul 1.1
|
Marime |
Unitate de masura |
|||||
|
Nr.crt. |
Denumire |
Simbol |
Ecuatie de definitie |
Denumire |
Simbol |
Dimensiune |
|
1 |
Putere |
P |
P=U I |
Watt |
W |
V A |
|
2 |
Cantitate de electricitate |
Q |
Q=I t |
Coulomb |
C |
A s |
|
3 |
Tensiune electrica |
U |
U=P/I |
Volt |
V |
V |
|
4 |
Intensitate camp electric |
E |
E= U |
Volt /metru |
V/m |
V/m |
|
5 |
Rezistenta |
R |
R=U/I |
Ohm |
W |
W |
|
6 |
Capacitate |
C |
C=Q/I |
Farad |
F |
s/W |
|
7 |
Tensiune magnetomotoare |
- |
F= n I |
Amper (amper spira) |
Asp |
A |
|
8 |
Intensitate camp magnetic |
H |
H=I/2 l |
Amper/metru |
A/m |
A/m |
|
9 |
Flux magnetic |
F |
E=dF/dt |
Weber |
Wb |
V s |
|
10 |
Inductivitate |
L |
L=F/I |
Henry |
H |
W s |
|
11 |
Inductie magnetica |
B |
B=F/S |
Tesla |
T |
V s/m2 |
|
12 |
Frecventa |
f |
f=1/T |
Hertz |
Hz |
s-1 |
|
13 |
Flux luminos |
j |
j=I/v |
Lumen |
lm |
cd-1 |
|
14 |
Iluminare |
E |
E=j/A |
Lux |
lx |
lm/m2 |
|
15 |
Stralucire (Luminanta) |
B |
B=I/A |
candela/m2 |
cd/m2 |
cd/m2 |
|
16 |
Energie |
W |
W=P t |
Watt ora |
W h5 |
V A s |
|
17 |
Forta |
F |
F= m a |
Newton |
N |
Kg m s-2 |
Amperul/metru (A/m) reprezinta tensiunea magnetomotoare pe unitatea de lungime intr-un camp magnetic uniform (1A/m = 4p 10-3 Oe).
Weberul (Wb) este fluxul de inductie magnetica, care traversand o singura spira, induce in aceasta spira o t.e.m. de 1 V cand fluxul respectiv descreste uniform la zero in timp de o secunda. Weberul/m2 = Tesla (T) este unitatea pentru inductie magnetica.
Henry-ul (H) este inductivitatea unui circuit electric inchis in care la o variatie uniforma a curentului, cu viteza de 1 A/s se produce (in acea spira) o t.e.m. de 1 V.
Fluxul luminos j) reprezinta energia luminoasa radiata total de un izvor luminos intr-un unghi solid w, cu varful in izvorul respectiv (w = 4p steradiani). Ecuatia de definitie j = I/w; unitatea de masura: lumen (lm).
Luminanta (B) este raportul dintre intensitatea luminoasa a unei surse de lumina si o suprafata perpendiculara pe raza acestei surse. Unitatea: candela/m2 (cd/m2).
Observatie
- In ultima coloana a tabelului T.1 sunt trecute dimensiunile (relative) ale unitatilor mentionate. Aceste dimensiuni sunt utile la verificarea rapida a corectitudinii relatiilor de calcul in care intra astfel de marimi. O asemenea verificare se numeste analiza dimensionala.
Unitati SI auxiliare
In aceasta clasa sunt incluse doua unitati geometrice: radianul si steradianul.
1. Radianul (rad) este unghiul plan cuprins intre doua raze care intercepteaza pe circumferinta unui cerc un arc de lungime egala cu cea a razei.
2. Steradianul (sr) este unghiul solid care, avand varful in centrul unei sfere, delimiteaza pe suprafata acestei sfere o arie egala cu cea a unui patrat a carui latura este egala cu raza sferei.
Deosebirile dintre traductor si aparatul de masurat
Prin aparat de masurat se intelege acel dispozitiv care stabileste o dependenta intre marimea de masurat si o alta marime ce poate fi perceputa nemijlocit cu ajutorul organelelor de simt umane, intr-o maniera care permite determinarea valorii marimii necunoscute in raport cu o anumita unitate de masura.
In cazul SRA conducerea procesului facandu-se fara participarea directa a operatorului uman, mijloacele prin care se realizeaza operatia de masurare se numesc traductoare.
Traductorul (definit in sensul atribuit de automatica) este un dispozitiv de automatizare care stabileste o corespondenta intre marimea de masurat (ce poate fi de orice natura sau domeniu de variatie) si o marime de natura data, avand un domeniu de variatie calibrat, marime ce este receptionata si prelucrata de catre echipamentele de conducere (regulatoare si calculatoare de proces).
Notiunea de traductor se poate extinde pentru definirea unor elemente cu functiuni similare care intra in structura unor lanturi de masurare complexe, utilizate in scopuri de cercetare, sau laboratoare metrologice .
Observatii:
Facand paralelismul functional intre aparatele de masurat si traductoare, se observa o serie de deosebiri prin faptul ca traductorul este un element component al SRA.
Informatia furnizata de traductor nu se adreseaza unui operator uman, ci unui echipament de conducere sau reglare automata.
Deosebirile dintre traductor si aparatul de masurat rezida mai ales in natura caracteristicilor statice si dinamice. Din punct de vedere al caracteristicilor, traductoarelor li se impun urmatoarele cerinte:
a) Relatie de dependenta liniara intre intrare si iesire (I - E).
b) Dinamica proprie care sa nu influenteze in mod esential comportarea SRA.
Aceste cerinte reprezinta restrictii severe in constructia traductoarelor.
- Daca pentru un aparat de masura relatia de dependenta I-E poate fi neliniara, in acest caz scara aparatului gradandu-se neliniar, in cazul traductorului dependenta I-E este impusa strict liniara, adica, eroarea de neliniaritate admisa este foarte redusa. Toate operatiile de conducere a procesului se bazeaza pe aceasta proprietate.
In ceea ce priveste, dinamica proprie, este necesar ca informatia furnizata de traductor catre echipamentul de conducere sa ajunga la aceasta fara intarziere, pentru ca deciziile de conducere sa fie oportune.
Rezulta ca dinamica proprie a traductorului trebuie sa fie rapida, incat programarea informatiei prin traductor (intre I si E) sa se faca cu intarzieri minime (neglijabile) in raport cu dinamica procesului condus.
Se observa (deduce) ca traductoarele trebuie sa imbine cerintele de liniaritate si viteza de raspuns cu performantele metrologice privind precizia, similare cu cele ale aparatelor de masura sau chiar mai ridicate, tinand seama ca posibilitatile de discriminare ale SRA sunt superioare fata de cele oferite de operatorul uman.
Toate consideratiile implica si necesitatea unei fiabilitati sporite in raport cu aparatele de masurat, datorita faptului ca o indicatie gresita data de un aparat de masurat poate fi usor sesizata si interpretata de catre operator, pe cand detectarea unor valori eronate furnizate de traductoare este mult mai dificila in cazul unui SRA.
Pozitia traductoarelor in cadrul S.R.A.
Se considera schema structurala, a unui sistem monovariabil de reglare automata, prezentat in figura i.3.
 Fig. i.3 Schema de principiu
a unui SRA monovariabil
Fig. i.3 Schema de principiu
a unui SRA monovariabil
Intrucat semnificatia si rolul elementelor ce compun aceasta schema sunt cunoscute de la disciplina Bazele Sistemelor Automate, aici trebuie observat numai faptul ca traductorul este plasat pe calea de reactie, avand la intrare marimea reglata (y), pe care o converteste (o traduce) in marime de reactie (yr ). Marimea de reactie, insumata cu referinta (r), determina eroarea de reglare (e) conform relatiei
![]() (i.2)
(i.2)
In cazul unui sistem multivariabil de reglare si/sau conducere automata schema de principiu este de tipul celei din figura i.4.
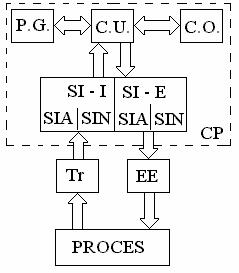
Fig. i.4Sistem de conducere automata a unui proces multivariabil
Semnificatia notatiilor din figura i.4 este
Tr traductoare; EE element de executie; SI-I sistem de interfata a intrarilor; SI-E sistem de interfata a iesirilor; SIA sistem de interfata pentru marimi analogice; SIN sistem de interfata pentru marimi numerice; C.P. calculator de proces; C.O. - -consola operator; C.U. calculator universal; P.G. periferice generale.
Din cele doua scheme se constata ca traductoarele (Tr) sunt situate pe calea informationala avand sensul de transmitere de la proces catre sistemul de conducere, iar EE sunt plasate pe calea de transmitere a comenzilor de la sistemul de conducere catre proces. Cuplarea traductoarelor cu procesul se poate realiza in diverse moduri: mecanic, termic, electric etc, in raport cu natura fenomenelor purtatoare de informatie referitoare la marimea de masurat.
Datorita unor avantaje bine cunoscute, majoritatea echipamentelor de automatizare sunt electrice sau electronice, si numai in cazuri speciale pneumatice (medii cu pericole de explozii sau incendii).
Ca urmare, semnale de iesire ale traductoarelor sunt de natura electrica (tensiune, curenti) sau pneumatica (aer instrumental).
Semnalele de iesire ale traductoarelor, indiferent de natura lor electrica sau pneumatica, au domenii de variatie fixate.
In acest mod se creaza posibilitatea utilizarii de echipamente tipizate, realizandu-se asa-numitele sisteme unificate de aparate pentru automatizare.
Prin sistem unificat de echipamente pentru automatizare se intelege ansamblul aparatelor si dispozitivelor realizate dupa un principiu constructiv unic, ce utilizeaza un semnal unificat.
Sistemele unificate de echipamente pentru automatizari, in care sunt incluse si traductoarele, asigura avantaje tehnico-economice legate de producerea in serii mari, modularizarea, tipizarea si interconectarea rapida a diferitelor componente, ceea ce contribuie la reducerea costurilor de intretinere si depanare.
Intrucat traductoarele sau unele componente ale acestora sunt montate direct in instalatiile in care se desfasoara procesul, este necesar ca acestea sa functioneze corect, in conditii foarte dificile: umiditate, medii corozive sau uneori la temperaturi ridicate sau la presiuni foarte mari.
Asigurarea unei functionari corecte in asemenea conditii dificile impune o atentie deosebita la realizarea constructiva a traductoarelor.
Structura generala a unui traductor
Realizarea functiilor (mentionate) de catre traductor astfel incat semnalul obtinut la iesirea acestuia sa reprezinte valoric marimea masurata, sub forma accesibila dispozitivelor de automatizare, implica o serie de operatii de conversie insotite totodata si de transformari energetice bazate fie pe energia asociata marimii preluate din proces, fie pe cea furnizata de sursele auxiliare. Schema structurala a unui traductor este prezentata in figura i.5.
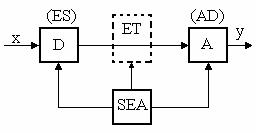
Fig. i.5- Structura generala a unui traductor
Semnificatia blocurilor functionale este urmatoarea:
D s ES (element sensibil), sau detector; ET = element de transmitere (de transfer); A s AD este adaptorul; SEA este sursa de energie auxiliara.
Marimea de masurat x este aplicata la intrarea traductorului, reprezentand parametrul reglat (temperatura, debit, presiune, turatie, nivel, vitaza, forta etc).
Marimea de iesire y reprezinta valoarea marimii masurate, exprimata sub forma de semnal analogic (curent, tensiune sau presiune).
a) Detectorul (D) numit si element sensibil, senzor sau captor este elementul specific pentru detectarea marimii fizice pe care traductorul trebuie sa o masoare.
In mediul in care trebuie sa functioneze traductorul, in afara marimii x, exista si alte marimii fizice. Detectorul trebuie sa aiba calitatea de a sesiza numai variatiile marimii x, fara ca informatiile pe care acesta le furnizeaza sa fie afectate de celelalte marimi din mediul respectiv (din proces).
In urma interactiunii dintre marimea de masurat si detector are loc o modificare de stare a acestuia, care, fiind o consecinta a unor legi fizice cunoscute teoretic sau experimental, contine informatia necesara determinarii valorii marimii de masurat.
Modificarea de stare presupune un consum energetic preluat de la proces. In functie de fenomenele fizice pe care se bazeaza detectia si de puterea asociata marimii de intrare, modificarea de stare se poate manifesta sub forma unui semnal la iesirea elementului sensibil.
(Exemplu: Tensiunea electromotoare generata la bornele unui termocuplu in functie de temperatura.)
In alte situatii modificarea de stare are ca efect modificarea unor parametrii de material a caror evidentiere se face utilizand o energie de activare de la o sursa auxiliara (SEA).
Indiferent cum se face modificarea de stare a detectorului (D), informatia furnizata de acesta nu poate fi folosita ca atare, necesitand prelucrari ulterioare prin (ET) si (A).
b) Adaptorul (A) are rolul de a modifica (adapta) informatia obtinuta la iesirea detectorului (D) la cerintele impuse de aparatura de automatizare, care o utilizeaza, adica sa o converteasca sub forma impusa pentru semnalul de iesire y.
Particularitatile semnificative ale adaptorului
La partea de intrare, adaptorul se caracterizeaza printr-o mare diversificare constructiva pentru a putea prelua variatele forme sub care pot sa apara modificarile de stare ale diferitelor elemente sensibile (ES).
Pe parte de iesire, adaptoarele cuprind de regula (la echipamentele standardizate) elemente comune necesare generarii semnalelor unificate, care nu depind de tipul sau domeniul de variatie al marimii de intrare.
Functiile realizate de adaptor sunt complexe, ele incluzand si adaptarea de nivel, putere (sau impedanta) cu referire la semnalul de iesire, in raport cu dispozitivele de automatizare.
Adaptorul asigura conversia variatiilor de stare ale ES in semnale calibrate la iesire, ce reprezinta (la o alta scara) valoarea marimii de intrare. Deci, adaptorul (AD) realizeaza operatia specifica masurarii, adica comparatia cu unitatea de masura adoptata.
Modalitatile practice de efectuare a comparatiei sunt diverse si acestea diferentiaza tipurile de adaptoare (determina diferentieri structurale ale adaptoarelor).
Astfel, comparatia poate fi simultana cand se compara permanent o marime etalon cu marimea de intrare.
De cele mai multe ori comparatia este succesiva (nesimultana) cand marimea etalon este aplicata numai initial pentru calibrare (fiind memorata) iar marimea de masurat se aplica permanent.
In acest caz valoarea memorata a marimii etalon se compara succesiv cu valorile marimii de intrare (care variaza).
In functie de legile fizicii pe care se bazeaza detectia realizata de (ES) operatia de masurare in cadrul adaptorului presupune posibilitatea efectuarii unor operatii de calcul liniare ( amplificare, atenuare, sumare, integrare, diferentiere) sau neliniare ( produs, ridicare la putere, radical, logaritmare etc) cat si realizarea unor functii intentionat neliniare introduse pentru compensarea neliniaritatilor inerente unor componente astfel incat la iesirea adaptorului dependenta (I-E) sa rezulte liniara.
In functie de elementele constructive, impuse de natura semnalelor de iesire, adaptoarele sunt de doua feluri:
Adaptoare electrice (electronice);
Adaptoare pneumatice.
In raport cu forma de variatie a semnalelor de iesire, adaptoarele pot fi:
a)- Analogice;
b)- Numerice.
Semnalele analogice se caracterizeaza prin variatii continue ale unui parametru caracteristic si sunt, de regula, semnale unificate.
Prin semnal unificat se intelege adoptarea ca semnal a aceleiasi marimi fizice, cu acelasi domeniu de variatie, indiferent de locul unde este plasat elementul de automatizare intr-un SRA.
Frecvent utilizate sunt urmatoarele semnale unificate:
1) Curentul continuu (in cazul sistemelor de reglare a proceselor lent variabile) cu domeniul de variatie:
IccI[ 2 10] mA , sau IccI[4 20] mA
2) Tensiunea continua (in cazul sistemelor de reglare a proceselor rapide), cu domeniul de variatie:
VccI[0 10] V; sau VccI[-10 +10] V;
3) Presiunea aerului instrumental (aer fara impuritati si cu umiditate minima standardizata) produs in instalatii speciale:
p I[0,2 1] daN/cm2 sau: pI [0,2 1] bar.
Semnalele numerice, generate la iesirea traductoarelor numerice si utilizate in SRAN, se caracterizeaza prin variatii discrete care permit reprezentarea intr-un anumit cod a unui numar de valori din domeniul de variatie a semnalului analogic de la intrarea traductorului.
Cele mai utilizate coduri (cu nivele compatibile TTL) sunt:
binar - natural, cu 8, 10, 12, 16, 32 biti (uneori 64 biti);
binar codificat zecimal cu 2, 3 sau 4 decade.
Observatii:
a) Utilizarea unui traductor este precedata de operatia de calibrare initiala prin care intervalul de variatie al semnalului analogic de la iesirea traductorului (adaptorului) se asociaza domeniului necesar al marimii de intrare in traductor si in consecinta, fiecarui nivel de semnal la iesire ii corespunde o valoare bine precizata a marimii de intrare (a marimii traduse) prin legea de dependenta liniara a marimii masurate.
b) Particularitatile referitoare la aspectele tehnologice sau economice impun si prezenta unor elemente auxiliare.
Exemplu: In masurarea temperaturilor inalte, elementul sensibil (ES) nu poate fi plasat in aceeasi unitate constructiva cu adaptorul. Deci, este necesar un element de legatura intre ES si A (adaptor). Aceste elemente, (ET) de transmisie, realizeaza legaturi electrice, mecanice, optice etc intre ES si A.
Daca marimea generata de ES este neadecvata pentru transmisie (cazul transmisiilor la mare distanta) atunci ET contine si elemente de conversie potrivit cerintelor impuse de canalele de transmisie.
c) In categoria elementelor auxiliare intra si sursele de energie auxiliara, care ajuta la conversia semnalelor din ES si A, atunci cand aceste conversii nu se pot obtine utilizand puterea asociata marimii de masurat, sau cand aceste conversii (cu energie proprie luata de la semnalul de masurat) introduc dificultati in realizarea performantelor cerute semnalului de iesire din traductor.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||||||
|
|||||||
|
|||||||
Documente online pe aceeasi tema | |||||||
|
| |||||||
|
|||||||
|
|
|||||||