|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Tehnica mecanica
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica Proiectarea unui nou tip de autoturism |
Proiectarea unui nou tip de autoturism
1.Studiul solutiilor similare
Pentru abordarea proiectarii unui nou tip de autoturism , tinand seama de datele inpuse prin tema , care precizeaza anumite particularitati legate de destinatia si performantele acestuia , este nevoie , intr-o prima etapa sa se caute un numar cat mai mare de solutii constructive , deja existente , avand caracteristici asemanatoare cu cele ale autovehiculului cerut. Utilizand caracteristicile communicate de diverse firme constructoare , din literatura de specialitate , care cuprind informatii legate de organizarea generala , modul de dispunere a motorului si a puntii motoare , de organizarea transmisiei , date legate de -dimensiunile geometrice principale , greutate utila si proprie , tipul sistemelor de directie si franare , tipul suspensiei etc. am ales cateva modele mai cunoscute , ca punct de plecare.
Astfel pentru autovehiculul dat, tinand cont de domeniul de utilizare al acestuia, respectiv transportarea marfurilor, atat in mediul urban cat si in cel interurban, organizarii transmisiei autovehiculului, constituie problema fundamentala de conceptie constructiva. Pe baza acestei organizari se stabileste caracterul in miscare si in acelasi timp limiteaza posibilitatea de dezvoltare si de amplasare a celorlalte componente ale autovehiculului.
![]() Solutia adoptata in acest caz
este solutia clasica, aceasta impune divizarea echipamentului de
tractiune in mai multe grupuri de agregate si permite o mai mare
elasticitate in organizarea generala a autoturismului. Motorul care
constituie sursa energetica a autovehiculului, este dispus longitudinal,
asigura simplitate constructiva, buna accesibilitate la motor
si intretinerea sa fie cit mai usoara. Cutia de viteze
se dispune in prelungirea motorului, iar transmisia principala la puntea din
spate.
Solutia adoptata in acest caz
este solutia clasica, aceasta impune divizarea echipamentului de
tractiune in mai multe grupuri de agregate si permite o mai mare
elasticitate in organizarea generala a autoturismului. Motorul care
constituie sursa energetica a autovehiculului, este dispus longitudinal,
asigura simplitate constructiva, buna accesibilitate la motor
si intretinerea sa fie cit mai usoara. Cutia de viteze
se dispune in prelungirea motorului, iar transmisia principala la puntea din
spate.
Solutia clasica permite o incarcare echilibrata a puntilor si uzura uniforma a pneurilor, ventilatoarele de racire a motorului pot fi cu functionare intermitenta, deoarece radiatorul este amplasat in zona de presiune dinamica maxima. Dezavantajele acestui tip de solutie au fost diminuate, astfel ca pentru eliminarea vibratiilor, caroseria se monteaza pe sasiu cu ajutorul bucselor din cauciuc.
Analizind cu atentie toate aceste informatii si avand in vedere tendintele de dezvoltare caracteristice pentru fiecare categorie de autovehicule cercetata se pot stabili , pentru inceput , prin comparare ,unele date initiale absolut necesare pentru calculul de predimensionare , cum ar fi : organizarea generala , amenajarea interioara , dimensiuni geometrice , greutatea autovehicolului si repartizarea sa pe punti , alegerea rotilor si determinarea razei de rulare .
Autocamionetele sunt autovehicule destinate transportului de bunuri , iar in constructia lor in cazul tendintelor actuale se urmareste cresterea eficientei economice a transportului de marfa , marirea vitezei de transport an conditii de crestere a coeficientului de siguranta a deplasarii in trafic rutier .Asttfel se cauta cresterea coeficientului de utilizare a hG , fapt ce arata ca sporeste masa utila transporata raportata la masa proprie a autocamionetei .Se extind preocuparile imbunatatiiri conditiilor de lucru ale conducatorului prin creerea unui microclimat optim pentru conducerea in siguranta .
|
|
Roman dac |
Roman dac |
Roman dac |
Roman dac |
Roman dac |
Roman dac |
|
Punte motoare |
F+S |
F+S |
F+S |
F+S |
F+S |
F+S |
|
Nr usi |
2 |
2 |
2 |
2 |
2 |
2 |
|
Nr. locuri |
2 |
2 |
2 |
2 |
2 |
2 |
|
C.V. |
5+1 trepte |
5+1 trepte |
5+1 trepte |
5+1 trepte |
5+1 trepte |
5+1 trepte |
|
Masa totala |
7100 kg |
7100 kg |
7110kg |
8000kg |
8500kg |
8500kg |
|
Lungime |
6440 mm |
6360 mm |
6360 mm |
6980 mm |
7190mm |
7230mm |
|
Latime |
2296 mm |
2290 mm |
2292mm |
2380 mm |
2400 mm |
2410mm |
|
Inaltime |
2665 mm |
2655 mm |
2670 mm |
2950 mm |
2820 mm |
2820 mm |
|
Ampatament |
3000 mm |
3000 mm |
3000 mm |
3600 mm |
3600 mm |
3600 mm |
|
Ecatament |
1450/ 1380 mm |
1400/ 1400 mm |
1330/ 1340 mm |
1486/ 1486 mm |
1520/ 1525 mm |
1530/ 1600 mm |
|
Putere max.. |
120CP/ 2500rpm |
110CP/ 2800 rpm |
114CP/ 2500 rpm |
120/CP 2500 rpm |
140/CP 2400 rpm |
120CP/ 2500 rpm |
|
Cuplu max . |
370Nm/ 1800 rpm |
360Nm/ 1600 rpm |
378Nm/ 1500 rpm |
370Nm/ 1800 rpm |
460Nm/ 1300 rpm |
370Nm/ 1800 rpm |
|
|
|
|||||
|
Pneuri |
7.50R/16 |
7,50/R16 |
7.50/R16 |
7,50/R16 |
16.00/70-20 |
16.00/70-20 |
|
Viteza max. |
113.10Km/h |
107Km/h |
110 Km/h |
89Km/h |
82Km/h |
92Km/h |
Amenajarea interioara a autocamioanelor
Pentru autobuze si autocamioane dimensiunile postului de conducere si amplasarea organelor de comanda sunt reglementate prin STAS R 10666/1-76 si regulamentul nr.35 ECE-onu. Dimensiunile cabinei, ale locului de munca al conducatorului si amplasarea organelor de comanda trebuie sa asigure conditii de munca optime, astfel incat acesta sa depuna un efort fizic minim si sa se poate concentra asupra circulatiei rutiere. Avand in vedere timpul petrecut de catre conducator in cabina autocamionului sau in autobuz, se intelege ca microclimatul trebuie sa-i ofere, in masura posibilului, oportunitatile, inclusiv de repaus, de care el are nevoie la deplasarea pe distante apreciabile. In figurile A1.15, A1.16, A1.17 este prezentat modul de amplasare a comenzilor prin pedale fata de postul de conducere.
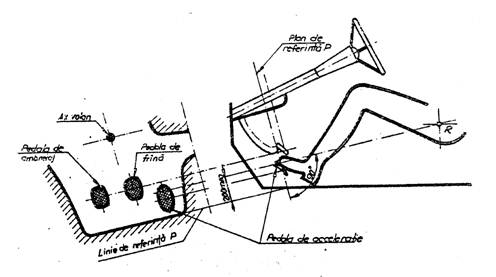
Fig.A1.15. Amplasarea pedalelor de comanda
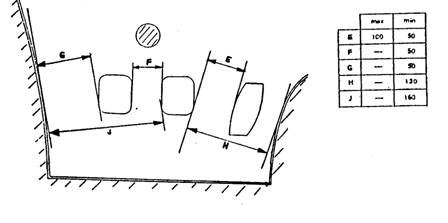
Fig.A1.16. Trei pedale-transmisie conventionala
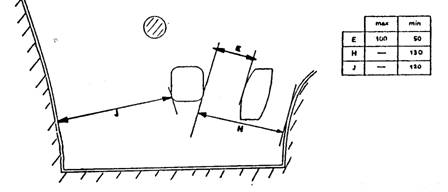
Fig.A1.17. Doua pedale-transmisie automata
Dimensiunile cabinei sunt prezentate in figura A1.18. iar semnificatiile notatiilor se gasesc in tabelul A1.5.
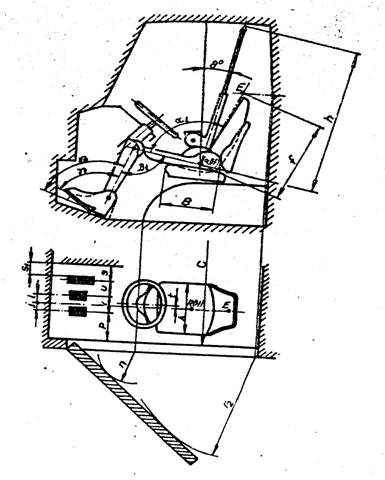
Fig.A1.18. Masurarea dimensiunilor cabinei autocamioanelor
Tabelul A1.5. Dimensiunile cabinei
|
Nr. crt. |
Denumirea |
Dimensiuni |
|
1. |
Distanta de la punctul R la tapiseria acoperisului, h [mm] |
1000 |
|
2. |
Distanta de la punctul R la punctul E, f [mm] |
495 |
|
3. |
Adancimea scaunului, B [mm] |
400 |
|
4. |
Latimea pernei scaunului, A [mm] |
450 |
|
5. |
Latimea interioara a cabinei, C [mm] |
|
|
cu 1 loc |
750 |
|
|
cu 2 locuri |
1250 |
|
|
cu 3 locuri (cu cuseta) |
1900 |
|
|
cu 3 locuri (fara cuseta) |
1750 |
|
|
6. |
Latimea de trecere la deschiderea usii, r1, r2 [mm] |
250, 650 |
|
7. |
Unghiul dintre gamba si talpa piciorului, |
30, 90110 |
|
8. |
Unghiul dintre perna scaunului si spatar, |
95 |
|
9. |
Distanta de la axa pedalei de acceleratie la peretele din partea dreapta, s [mm] |
80 |
|
10. |
Distanta de la axa pedalei de acceleratie, la axa pedalei de frana, u [mm] |
110 |
|
11. |
Distanta dintre axa pedalei de frana si axa pedalei de ambreiaj, v [mm] |
150 |
|
12. |
Distanta de la axa pedalei de ambreiaj la peretele lateral, p [mm] |
110 |
|
13. |
Distanta de la axa de simetrie a scaunului conducatorului la: |
|
|
axa pedalei de frana, l [mm] |
50150 |
|
|
axa pedalei de ambreiaj, j [mm] |
In cazul autocamioanelor caroseria se compune din cabina pentru conducator si platforma pentru transportul bunurilor.
Cabinele sunt de tip inchis, cu geamuri mobile. Ele sunt prevazute, in mod normal, cu doua-trei locuri, iar uneori chiar cu sase-opt locuri. La autocamioanele pentru transportul pe distante lungi, cabina este prevazuta cu un pat pentru conducatorul auto de schimb. Cabina poate fi dispusa in spatele puntii din fata, sau pe puntea din fata (cabina avansata).
La autocamioanele avand motorul asezat in fata cabinei, pericolul de accidentare a conducatorului este mai mic si, ca urmare, se poate realiza o constructie de cabina mai usoara. Cabinele avansate trebuie sa fie realizate cu o rigiditate mai mare pentru a spori securitatea conducatorului, deoarece la aceste constructii riscul de accidentare este mai mare. Cabinele autocamioanelor trebuie sa fie bine izolate termic si fonic, sa fie etanse, sa aiba instalatii de ventilatie si climatizare.
O atentie deosebita trebuie acordata suspensiei cabinei deoarece frecventa oscilatiilor suspensiei autocamionului se modifica cu incarcatura. Pentru aceasta
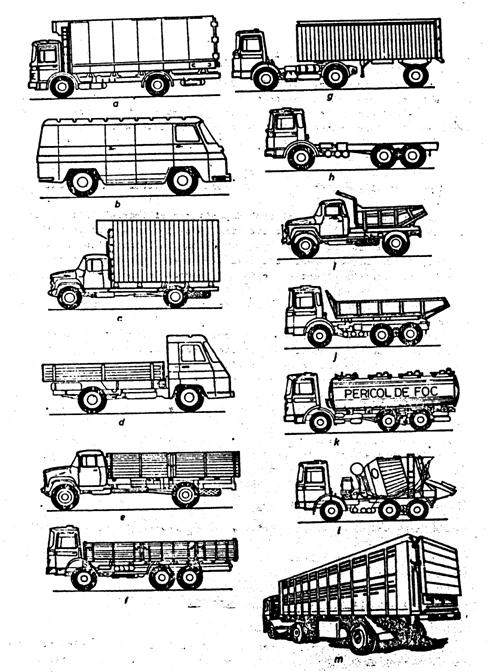
Fig.A1.19. Variante de caroserii ale autovehiculelor pentru transportul de bunuri:
a-autofrigorifica, b-autofurgoneta; c-autoizoterma; d-autocamioneta; e-autocamion 4x2; f-autocamion 6x4; g-autocamion cu semiremorca; h-autocamion pick-up,
i-autobasculanta 4x2, j-autobasculanta 6x4, k-autocisterna; l-autobetoniera,
m-autocamion pentru transport animale.
cabina se monteaza pe cadru cu ajutorul tampoanelor de cauciuc sau al unei suspensii compuse din arcuri si amortizoare.
Partea din caroserie destinata transportului incarcaturii utile poate avea diferite forme in functie de destinatie (fig.A1.19).
Tot mai folosit in ultimul timp se foloseste transportul containerizat si paletizat de marfuri generale. In tabelul A1.6 se prezinta date caracteristice ale unor transcontainere de tip inchis.
Tabelul 1.6. Dimensiunile si greutatile transcontainerelor de tip inchis
|
Felul transcontainerului |
Inaltimea mm] |
Latimea [mm] |
Lungimea [mm] |
Masa bruta [kg] |
|
1A |
2438 |
2438 |
12192 |
30480 |
|
1B |
2438 |
2438 |
9125 |
25400 |
|
1C |
2438 |
2438 |
6058 |
20320 |
|
1D |
2438 |
2438 |
2991 |
10160 |
In STAS 6299/4-83 sunt prezentate dimensiunile exterioare de gabarit (fig.A1.20, tabelul A1.7) si dimensiunile interioare ale containerelor mari de uz general, iar in STAS 602811-89 si 6028-89 sunt prezentate caracteristicile constructive ale paletelor de transport (fig.A1.21).
2.Alegerea principalelor dimensiuni geometrice si de masa
Functie de tipul si destinatia autovehiculului definite prin tema de proiectare , tinand seama de autovehiculele similare considerate in studiul solutiilor similare si avand in vedere tendinta de dezvoltare se adopta un autocamion care are urmatoarele caracteristici :
lungimea autocamionului - 6440mm, care reprezinta distanta dintre 2plane perpendiculare pe planul longitudinal de simetrie al automobilului si tangente la acesta in punctele extreme din fata si din spate .toate elementele din fata si din spate sunt incluse in aceste 2 plane .
latimea vehiculului -2296 mm , reprezinta distanta intre 2 plane paralele cu planul longitudinal de simetrie al vehiculului , tangente la acesta de o parte si de alta . Toate organele laterale ale vehiculului fixate rigid cu exceptia oglinzilor retrovizoare , sunt cuprindse in aceste plane
inaltimea vehiculului - 2665 mm , reprezinta distanta dintre planul de sprijin si un plan orizontal tangent la partea cea mai de sus a vehiculului pregatit de plecare in cursa , fara incarcatura utila cu pneurile umflate la presiunea corespunzatoare masei totale admise
ampatamentul - 3000 mm reprezinta distanta intre perpendicularele coborate pe planul longitudinal de simetrie al vehiculului .
ecartamentul 1450/1380 mm reprezinta distanta dintre centrele petelor de contact ale pneurilor cu solul .
Motorul este amplasat in fata si dezvolta o putere de 120 CP la 2500 rpm , un cuplu de 370Nm la 1800 rpm , ajungand la o viteza maxima de 113.10 km/h .Masa autocamionului o adopt 7100 kg
Alegere rotilor .
Rotile de automobil sint alcatuite dintr-o janta metalica, pe care se monteaza o anvelopa de cauciuc in interiorul caruia se afla o camera cu aer comprimat, uneori lipsind aceasta. Rigiditatea anvelopei este data de raportul dintre cresterea fortei care actioneaza asupra pneului si deformatia determinata de aceasta crestere. Rigiditatea depinde de materialul anvelopei, de constructia ei, de presiunea interioara a aerului din pneu si de duritatea suprafetei de sprijin.
Alegerea tipului de pneuri este conditionata de mai multi factori cum ar fi, viteza maxima transmisa prin tema de proiect, si greutarea ce revine rotilor din spate si fata. Functie de greutatea repartizata puntilor se poate determina masa ce revine unui pneu.
Utilizind valori medii
din literatura de specialitate se adopta parametrul ![]() =0.55 pentru autovehiculul incarcat, unde L este ampatamentul
autovehiculului.
=0.55 pentru autovehiculul incarcat, unde L este ampatamentul
autovehiculului.
Din relatia anterioara va rezulta distanta :
a=L![]() mm
mm
Stiind ca L-a=b, rezulta ca, b=2955-16250=1330 mm.
Cu ajutorul coordonatelor longitudinale a, b, gasite se va determina greutatea pe puntea fata cu urmatoarea relatie:
G2 =![]() [daN]; G2=
[daN]; G2=![]() =1099 daN
=1099 daN
G1 =![]() [daN]; G1=
[daN]; G1= ![]() =900daN
=900daN
Inaltimea hg se determina prin
aceiasi metoda stiind ca raportul: ![]() =0,35 de
unde va rezulta, inaltimea hg=0,35
=0,35 de
unde va rezulta, inaltimea hg=0,35![]() =1050mm
=1050mm
Rotile de automobil sint alcatuite dintr-o janta metalica, pe care se monteaza o anvelopa de cauciuc in interiorul caruia se afla o camera cu aer comprimat, uneori lipsind aceasta. Rigiditatea anvelopei este data de raportul dintre cresterea fortei care actioneaza asupra pneului si deformatia determinata de aceasta crestere. Rigiditatea depinde de materialul anvelopei, de constructia ei, de presiunea interioara a aerului din pneu si de duritatea suprafetei de sprijin.
Alegerea tipului de pneuri este conditionata de mai multi factori cum ar fi, viteza maxima transmisa prin tema de proiect, si greutarea ce revine rotilor din spate si fata. Functie de greutatea repartizata puntilor se poate determina masa ce revineunui pneu folosind relatiile:
-pentru pneurile puntii fata:
Gp1=![]() Gp1=
Gp1=![]() =450daN
=450daN
-pentru pneurile puntii spate:
Gp2=![]() ; Gp2 =
; Gp2 =![]() =549,5daN
=549,5daN
unde n=2 sau 4, reprezinta numarul de pneuri ale puntii;
Pentru asigurarea unei bune confortabilitati puntea fata trebuie sa fie caracterizata de o elasticitate mai mare decat puntea spate. La obtinerea elasticitatii puntii fata contribuie si utilizarea presiunii interioare a aerului din pneu mai mica in fata decat in spate.
Prin reducerea presiunii pneurilor pe puntea din fata, se reduce rigiditatea laterala a pneului, astfel ca prin sporirea deviatiilor laterale se favorizeaza imprimarea unui caracter constructiv de subvirare, caracterizat de tendinta de autostabilizare pe traiectoria rectilinie.
Se adopta din literatura de specialitate, tinand cont si de solutiile similare pneurile 155 R13Scu urmatoarele dimensiuni principale:
-janta de masura 6 J
- latimea sectiunii maxime 157mm
- diametru exterior 578mm
- circumferinta de rulare 1750mm
- marimea camerei de aer H J13
Pentru calculele de dinamica autovehiculului este
necesara cunoasterea razei de rulare, care se apreciaza analitic
functie de raza nominala a rotii si un coeficient de
deformare. Coeficientul de deformare ![]() depinde de presiunea
din pneu si are valorile:
depinde de presiunea
din pneu si are valorile:
![]() =0,930-0,935, pentru pneuri utilizate la presiuni mai mici de
600 Kpa
=0,930-0,935, pentru pneuri utilizate la presiuni mai mici de
600 Kpa
![]() =0,945-0,950, pentru pneuri utilizare la presiuni mai mari de
600 Kpa
=0,945-0,950, pentru pneuri utilizare la presiuni mai mari de
600 Kpa
In cazul in care se precizeaza marimea circumferintei de rulare, raza de rulare se calculeaza cu relatia:
rr =![]()
![]() =278 mm
=278 mm
unde Lr este circumferinta de rulare
3 .Definirea conditiilor de autopropulsare
Rezistenta la rulare
Rezistenata la rulare ( Rr ) este o forta cu actiune permanenta la rularea rotilor pe cale, de sens opus sensului deplasarii autovehiculului.
Cauzele fizice ale acestei rezistente la inaintare sunt: deformarea cu histerezis a pneului, frecari superficiale intre pneu si cale, frecarile din lagarele rotii, deformarea caii, percutia dintre elementele pneului si microneregularitatile caii, efectul de ventuza produs de profilele cu contur inchis pe banda de rulare etc.
Fata de cauzele determinate, rezistenta la rulare depinde de un numar mare de factori de influenta, printre care semnificativi sunt: constructia pneului, viteza de deplasare, presiunea aerului din pneu, fortele si momentele ce actioneaza asupra rotii.
 In
calculele de proiectare dinamica
In
calculele de proiectare dinamica
a autovehiculelor, rezistenta la rulare
este luata in considerare prin coeficientul rezistentei
la rulare f, care reprezinta o forta specifica
la rulare definita prin relatia:
![]()
unde: Rr - este rezistenta la rulare ;
Ga cos a - componenta
greutatii normala pe cale ;
Functie de tipul, caracteristicile si
destinatia autovehiculului se recomanda
alegerea valorilor din domeniile marcate in
diagrama urmatoare:
Folosind relatia:
Rr = f * Ga* cos a [ N ]
si adoptand coeficientul rezistentei
la rulare f din diagrama, f = 0,017 , pentru
o cale de rulare ( cos a = 170 ), asfaltata, in stare buna (autocamioneta ceruleaza cu viteza maxima vmax = 140km/h), rezulta:
Rr = 0,017* 20000*0,96 = 326,5N
Rezistenta aerului
Rezistenta aerului ( Ra ) reprezinta interactiunea, dupa directia deplasarii, dintre aerul in repaus si autovehiculul in miscare rectilinie. Ea este o forta cu actiune permanenta de sens opus sensului de deplasare a automobilului.
Cauzele fizice ale rezistentei aerului sunt: repartitia inegala a presiunilor pe partea din fata si din spate a caroseriei, frecarea dintre aer si suprafetele pe langa care are loc curgerea acestuia, energia consumata pentru turbionarea aerului si rezistenta curentilor exteriori folositi pentru racirea diferitelor organe si pentru ventilarea caroseriei.
Pentru calculul rezistentei aerului se recomanda utilizarea relatiei :
Ra = 1/2 * r * Cx * A * v2 [ N ]
Unde : r - densitatea aerului ; pentru conditii atmosferice standard ( p = 101,33 * 10-3 [ N/m2 ] si T = 288 oK ) densitatea aerului este r = 1,225 [ kg/m3 ] ;
Cx - coeficientul de rezistenta a aerului ;
A - aria sectiunii transversale maxime [ m2 ] ;
V - viteza de deplasare a automobilului [ m/s ] ;
Notand produsul constant : 1/2 * r * Cx = K [ kg/m3 ] numit coeficient aerodinamic, rezistenta aerului este data de relatia:
Ra = K * A * v2 [ N ] unde : K = 0,6125 * Cx kg/m3 ( conditii atosferice standard ) ;
Aria transversala maxima se determina cu suficienta precizie cu relatia :
A = B * H [ m2 ] unde : B - ecartamentul autoturismului [ m ]
H - inaltimea autoturismului [ m ]
A = 1,380 * 1,55 = 2,14 m2
Pentru determinarea marimii coeficientului de rezistenta a aerului Cx , vom folosi metoda comparativa, conform literaturii de specialitate, analizand valoarea acestuia la solutiile similare propuse, si vom adopta o valoare medie. Cx = 0,38
Ra =0,32*2,14* =1033 N
=1033 N
Rezistenta la panta
La deplasarea autovehiculului pe cai cu inclinare longitudinala, greutatea da o componenta ( Rp ) dupa directia deplasarii, data de relatia : Rp = Ga * sin a [ N ].
Aceasta forta este o forta rezistenta la urcarea rampelor ( de sens opus vitezei de deplasare ) si o forta activa la coborarea pantelor.
Pentru pante cu inclinari mici (a 17 o ) la care eroarea aproximarii : sin a = tg a este sub 5% panta se exprima in procente p% = tg a. In acest caz expresia rezistentei la panta este data de relatia :
Rp = Ga * p [ N ]
Alegerea unghiului de inclinare longitudinala a caii se face functie de tipul si destinatia automobilului.
Pentru cazul nostru adoptam amax = 17 o ; rezulta Rp = 20000 * 0.2923 = 5800 N
Rezistenta la demarare
Regimurile tranzitorii ale miscarii automobilului sunt caracterizate de sporiri ale vitezei (demaraje) si reduceri ale vitezei (franare). Rezistenta la demarare ( Rd ) este o forta de rezistenta ce se manifesta in regimul de miscare accelerata a autovehiculului.
Ca urmare a legaturilor cinematice determinate in lantul cinematic al transmisiei dintre motor si rotile motoare, sporirea vitezei de translatie a autovehiculului se obtine prin sporirea vitezelor unghiulare de rotatie ale elementelor transmisiei si rotilor. Masa autovehiculului in miscare de translatie capata o acceleratie liniara, iar piesele aflate in miscare de rotatie, acceleratii unghiulare.
Influenta asupra inertiei in translatie a pieselor aflate in rotatie se face printr-un coeficient d , numit coeficientul de influenta a maselor aflate in miscare de rotatie.
Rezistenta la demarare este astfel data de relatia :
![]() =4200N unde :
=4200N unde :
ma - masa automobilului [ kg ] ;
d - coeficientul de influenta al maselor aflate in miscare de rotatie ;
dv/dt = a - acceleratia miscarii de translatie a autovehiculului [ m/s2 ].
Pentru calculul rezistentei la demarare este necesara cunoasterea marimii coeficientului de influenta a maselor aflate in miscare de rotatie.
Din calcule rezulta coeficientii maselor astfel : dm = 0,0263 si dR = 0,0277 .
Pentru acceleratia maxima in prima treapta a C.V. valoarea este a1 max = 2,5 m/s2.
Deoarece rezistenta la rulare cat si rezistenta la panta sunt determinate de starea si caracteristicile caii de rulare, se foloseste gruparea celor doua forte intr-o forta de rezistenta totala a caii ( Ry ), data de relatia : Ry = Rr + Rp = Ga ( f cos a + sin a ) = Ga * y [ N ] unde : y - coef. rezistentei totale a caii ;
Pentru valorile adoptate anterior y = 0,3 .
Ecuatia generala de miscare a automobilului
Pentru stabilirea ecuatiei generale a miscarii, se considera autovehiculul in deplasare rectilinie, pe o cale cu inclinare longitudinala de unghi a, in regim tranzitoriu de viteza cu acceleratie pozitiva. Luand in considerare actiunea simultana a fortelor de rezistenta si a fortei motoare ( de propulsie ) din echilibru dinamic dupa directia miscarii, se obtine ecuatia diferentiala :
![]()
Functie de conditiile de autopropulsare a autovehiculului, in ecuatia de miscare se definesc mai multe forme particulare :
a) pornirea din loc cu acceleratia maxima
In acest caz ecuatia generala de miscare capata forma particulara
![]() unde : a1
max - acceleratia in prima treapta a C.V.
unde : a1
max - acceleratia in prima treapta a C.V.
FR(a1 max) = 20000 * 0,017 + 2000 * 1,225 * 2,5= 340 + 6125 = 6465 N
b) deplasarea pe calea cu panta maxima
Corespunzator conditiilor formulate anterior, coeficientul rezistentei specifice a caii capata forma
FR max = Ga * ymax = 20000 * 0,3 = 6000 N
c) deplasarea cu viteza maxima
Din conditia realizarii vitezei maxime pe o cale orizontala in stare buna se obtine forma
![]()
FRv max = 20000 * 0,017+1/2 *1,225 * 2,135 * 0,38 * (140/3,6)2 = 340+738 = 1078 N
4.REACTIUNILE NORMALE ALE CAII DE RULARE
ASUPRA ROTILOR AUTOVEHICULELOR
In timpul deplasarii autovehiculului reactiunile la roti nu raman constante, ci se modifica in functie de regimul de miscare si de starea lui de incarcare. Cunoasterea valorilor acestor reactiuni este necesara la stabilirea conditiilor limita de inaintare, definite prin aderenta, la studiul franarii si al stabilitatii, precum si pentru calculul de dimensionare si verificare a elementelor componente ale puntilor.
4.1. Relatii de calcul
Pentru a determina reactiunile normale Z1 si Z2 la puntea fata si, respectiv, puntea din spate se utilizeaza modelul dinamic din figura 4.1,determinat prin metoda izolarii automobilului de cale si de mediu.
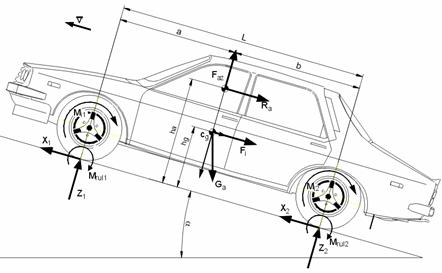
In rezolvarea acestei probleme se va considera autovehiculul ca un rigid, fara se se tina seama de miscarile suplimentare care intervin datorita oscilatiilor suspensiei, chiar atunci cand calea de rulare este perfect plana, asa cum se admite in cazul de fata.
Pentru determinarea directa a fortelor Z1 si Z2, considerand automobilul in echilibru static, ecuatia de momente in jurul centrul de greutate al autovehiculului cg are forma:
![]()
Ecuatia de proiectie a fortelor pe normala la cale este:
![]()
Neglijand forta
portanta ![]() in raport cu celelate
forte, relatia devine:
in raport cu celelate
forte, relatia devine:
![]()
Admitem ca: ![]() ;
; ![]() si se obtine:
si se obtine:
![]()
![]()
Cazul punte motoare spate. In situatia autovehiculelor cu o singura punte motoare si pentru care aceasta este puntea spate relatiile de legatura dintre reactiunile normale Z si reactiunle tangentiale X sunt date de:
![]()
|
In aceste conditii ecuatia (4.1) devine:
![]()
Grupand termenii obtinem:
![]()
Din relatia (4.3) se determina reactiunea normala Z2:
![]()
si inlocuind in relatia (4.8) se obtine:
![]()
sau reducand termenii:
![]()
Reactiunea normala la rotile puntii fata in regimul demararii este:
 =1348.23
=1348.23
Reactiunea normala la rotile puntii spate este:
 =1452.56
=1452.56
Coeficientii de incarcare dinamica sunt:
 respectiv
respectiv 
4.2. Calculul reactiunilor normale in regimul franarii.
In situatia franarii autovehiculelor acest proces poate fi analizat in situatia in care numai una dintre puntile autovehicului franeaza sau situatia in care autovehiculul franeaza cu ambele punti. In continuare va fi analizat cazul in care autovehiculul franeaza cu ambele punti.
Relatiile de legatura dintre reactiunile normale Z si reactiunle tangentiale X sunt date de:
![]()
Rezolvand similar cazul demararii la limita de adereta in cazul unui autovehicul cu ambele punti motoare obtinem pentru reactiunile normale urmatoarele expresii:
la rotile puntii fata:
![]() =2100
=2100
la rotile puntii spate:
![]()
respectiv coeficientii de incarcare dinamica a puntilor:
![]() =1.33 respectiv
=1.33 respectiv ![]()
5.Calculul de tractiune
Calculul de tractiune se face in scopul determinarii parametrilor principali ai motorului si transmisiei, astfel ca autovehiculul de proiectat cu caracteristicile definite anterior si in conditiile precizate in capitolul precedent sa fie capabil sa realizeze performantele prescrise in tema de proiectare sau a performantelor celor mai bune modele existente sau de perspectiva.
Randamentul transmisiei
 Pentru
propulsarea autovehiculului puterea dezvoltata de motor trebuie sa
fie transmisa rotilor motoare ale acestuia.
Pentru
propulsarea autovehiculului puterea dezvoltata de motor trebuie sa
fie transmisa rotilor motoare ale acestuia.
Transmisia fluxului de putere este caracterizata de pierderi datorate fenomenelor de frecare dintre organele transmisiei. Calitativ, pierderile de putere din transmisie se apreciaza prin randamentul transmisiei ht
Experimentarile efectuate au permis sa se determine urmatoarele valori ale randamentelor subansamblelor componente ale transmisiei :
cutia de viteze : hCV = 0,97..0,98 ( in treapta de priza directa ) ;
hCV = 0,92..0,94 ( in celelalte trepte ) ;
transmisia principala : h0 = 0,92..0,94 ( pentru transmisiile principale simple ) .
Deoarece valoarea globala a randamentului transmisiei depinde de numerosi factori a caror influenta este dificil de apreciat, in calcule se opereaza cu valori adoptate din diagrama alaturata.
Am adoptat ht = 0,93.
Determinarea caracteristicii externe a motorului
Aprecierea motorului ca sursa de energie pentru autopropulsarea autovehiculului se face prin oferta de putere si moment. Oferta se exprima functie de turatia arborelui motor printr-un camp de caracteristici P = f(n) si M = f(n) numite caracteristici de turatie. Domeniul de oferta este limitat de caracteristica externa ( sau caracteristica la sarcina totala ), care determina posibilitatile maxime ale motorului si in privinta puterii si a momentului la fiecare turatie din domeniul turatiilor de functionare ale acestuia. Caracteristica externa se completeaza si cu curba consumului specific de combustibil
Alegerea tipului motorului si a marimilor semnificative
Pentru propulsarea autovehiculelor, majoritatea motoarelor sunt motoare cu ardere interna cu piston in miscare de translatie. Existenta unei mari varietati de motoare cu ardere interna cu piston impune alegerea unor criterii de selectie bine definite. Optiunea pentru unul dintre tipuri are in vedere in principal modelul, caracteristicile si destinatia autovehiculului.
Statisticile apreciaza ca pentru autoturismele de mic litraj, pentru exploatare urbana, sunt utilizate cu precadere motoarele cu aprindere prin scanteie, cu sistem de alimentare cu combustibil prin injectie de benzina in detrimentul motoarelor cu aprindere prin compresie. Rezervele in utilizarea motorului Diesel se explica prin pretul de achizitie cu 20 - 30 % mai ridicat fata de modelele similare M.A.S., nivelul sonor mai ridicat, in special la mersul in gol, greutatea pe unitatea de putere sensibil mai ridicata.
Am adoptat un motor cu capacitatea cilindrica 1299 cm3 ( autoturismele alese in studiul solutiilor similare sunt dotate, majoritatea, cu motoare de 1,1..1,3 l ), cu raportul alezaj x cursa = 74 x 75,5 mm. Acesta, conform calculelor, dezvolta o putere de 37 kW la o turatie de 5000 rot/min si un cuplu de 94 Nm la o turatie de 2500 rot/min.
Pentru evaluarea caracteristicii exterioare in mod analitic se folosesc relatiile :
 unde :
unde :
Pmax - puterea maxima a motorului ;
M(n) - momentul functie de turatie .
Coeficientii relatiei se definesc astfel :
![]() unde :
unde :
![]() este coeficientul de
elasticitate al motorului ;
este coeficientul de
elasticitate al motorului ;
![]() este coeficientul de adaptabilitate al motorului .
este coeficientul de adaptabilitate al motorului .
Pentru completarea caracteristicii externe cu curba consumului specific se utilizeaza relatia :
 unde :
unde :
cep - consumul specific de combustibil la turatia puterii maxime.
Cunoscand turatia de putere maxima nP, turatia de moment maxim nM, puterea motorului Pmax, momentul maxim Mmax si relatiile de definire a celorlalte marimi avem :
![]()
Determinarea puterii maxim
Din definirea conditiilor de autopropulsare, deplasarea cu viteza presupune dezvoltarea unei forte la roata Fpmax . Din definirea puterii ca produs intre forta si viteza, realizarea performantei de viteza maxima, in conditiile prevazute, presupune pentru motor dezvoltarea unei puteri:
Pv max=![]() ;
;
Pv max= =120 CP
=120 CP
Pvmax=Pmax=120CP
Efectuand calculele rezulta coeficientii a b g cu valorile : a = 1 ; b = 1 ; g = -1 .
Principalele date ale motorului sunt centralizate in tabelele urmatoare :
|
No [rot/min] |
NM [rot/min] |
n ce [rot/min] |
NP [rot/min] |
n max [rot/min] |
P max [kW] |
M max [Nm] |
M p [Nm] |
|
500 |
2200 |
3000 |
4300 |
6000 |
83 |
230 |
70.6 |
|
Ce |
ca |
a |
b |
g |
con.P |
|
0.5 |
1.25 |
1 |
1 |
-1 |
240 |
Tabelul pentru trasarea caracteristicii externe :
|
n |
n/np |
A |
P |
M |
Ce |
B |
|
|
|
|
|
|
|
|
|
500 |
0.1162791 |
0.1282277 |
10.642899 |
203.27938 |
191.54408 |
1.0945376 |
|
700 |
0.1627907 |
0.1849774 |
15.353126 |
209.46051 |
185.22174 |
1.05841 |
|
900 |
0.2093023 |
0.2439408 |
20.247085 |
214.84407 |
179.50514 |
1.0257436 |
|
1100 |
0.255814 |
0.3045141 |
25.274668 |
219.43007 |
174.39427 |
0.9965387 |
|
1300 |
0.3023256 |
0.3660936 |
30.385765 |
223.2185 |
169.88913 |
0.970795 |
|
1500 |
0.3488372 |
0.4280755 |
35.530268 |
226.20937 |
165.98972 |
0.9485127 |
|
1700 |
0.3953488 |
0.4898562 |
40.658068 |
228.40268 |
162.69605 |
0.9296917 |
|
1900 |
0.4418605 |
0.550832 |
45.719056 |
229.79841 |
160.00811 |
0.9143321 |
|
2100 |
0.4883721 |
0.6103991 |
50.663124 |
230.39659 |
157.92591 |
0.9024337 |
|
2200 |
0.5116279 |
0.6394657 |
53.075654 |
230.39659 |
157.11195 |
0.8977826 |
|
2400 |
0.5581395 |
0.6957878 |
57.750387 |
229.80 |
155.93835 |
0.8910763 |
|
2600 |
0.6046512 |
0.7491919 |
62.182927 |
228.40268 |
155.37047 |
0.8878313 |
|
2800 |
0.6511628 |
0.7990743 |
66.323167 |
226.20937 |
155.40833 |
0.8880476 |
|
3000 |
0.6976744 |
0.8448313 |
70.120996 |
223.2185 |
156.05192 |
0.8917253 |
|
3200 |
0.744186 |
0.8858591 |
73.526306 |
219.43007 |
157.30124 |
0.8988643 |
|
3400 |
0.7906977 |
0.9215541 |
76.488988 |
214.84407 |
159.1563 |
0.9094646 |
|
3600 |
0.8372093 |
0.9513125 |
78.958934 |
209.46051 |
161.61709 |
0.9235262 |
|
3800 |
0.8837209 |
0.9745305 |
80.886035 |
203.27938 |
164.68361 |
0.9410492 |
|
4000 |
0.9302326 |
0.9906046 |
82.220182 |
196.30068 |
168.35587 |
0.9620335 |
|
4200 |
0.9767442 |
0.9989309 |
82.911266 |
188.52443 |
172.63386 |
0.9864792 |
|
4300 |
1 |
1 |
83 |
184.33721 |
175 |
1 |
|
4500 |
1.0465116 |
0.9955727 |
82.632536 |
175.3646 |
180.18659 |
1.0296376 |
|
4700 |
1.0930233 |
0.9818884 |
81.496736 |
165.59443 |
185.97891 |
1.0627366 |
|
4900 |
1.1395349 |
0.9583433 |
79.542493 |
155.0267 |
192.37696 |
1.0992969 |
|
5100 |
1.1860465 |
0.9243337 |
76.719698 |
143.66139 |
199.38075 |
1.1393186 |
|
5300 |
1.2325581 |
0.8792559 |
72.978241 |
131.49853 |
206.99027 |
1.1828015 |
|
5500 |
1.2790698 |
0.8225062 |
68.268014 |
118.5381 |
215.20552 |
1.2297458 |
|
5700 |
1.3255814 |
0.7534808 |
62.538909 |
104.7801 |
224.0265 |
1.2801514 |
Determinarea marimii rapoartelor de transmitere ale transmisie
Functionarea automobilului in conditii normale de exploatare are loc in regim tranzitoriu, gama rezistentelor la inaintare fiind foarte mare. In aceste conditii rezulta ca la rotile motoare ale autovehiculului, necesarul de forta de tractiune si de putere la roata sunt campuri de caracteristici avand in abscisa viteza aleasa de conducator. Pentru ca sa poata acoperi cu automobilul acest camp de caracteristici transmisia trebuie sa ofere un asemenea camp.
Situatiile care apar in timpul deplasarii unui autovehicul sunt:
a) motorul sa echilibreze prin posibilitatile proprii intreaga gama de rezistente. Acest lucru este posibil cand puterea furnizata este constanta in toate regimurile de deplasare. Daca aceasta valoare constanta corespunde puterii maxime, se obtine caracteristica ideala de tractiune data de relatia :
FR * v = PR max = ct.
unde:
FR = forta la roata;
v = viteza de deplasare;
PR max = puterea maxima la roata
. b) viteza maxima este delimitata prin puterea maxima de autopropulsare:
![]() unde FR v max
este forta la roata necesara deplasarii cu viteza
maxima de performanta.
unde FR v max
este forta la roata necesara deplasarii cu viteza
maxima de performanta.
c) cand viteza = 0 , rezulta o forta la roata infinita. Ca urmare, la viteze mici, limita este data de aderenta rotilor cu calea, definita cu relatia FR max FR = w * Gad unde :
![]() =0,7 coeficientul de aderenta;
=0,7 coeficientul de aderenta;
Gad = greutatea aderenta, respectiv greutatea ce revine in conditii de demaraj rotilor motoare.
. Determinarea valorii maxime a raportului de transmitere al transmisiei
Pentru valoarea maxima a raportului de transmitere, obtinut cand este cuplata prima treapta de viteza in cutia de viteze, se pot formula ca performante dinamice independente sau simultane urmatoarele: panta maxima sau rezistenta specifica a caii si acceleratia maxima la pornirea de pe loc.
Performantele date prin fortele la roata necesare pot fi formulate ca valori maxime cand fortele la roata oferite prin transmisie au valori maxime, respectiv motorul functioneaza la turatia momentului maxim pe caracteristica externa ( Mmax ) iar in transmisie este cuplat cel mai mare raport de transmitere it max .
it max = icv1 * i0 unde:
icv1 = raportul de transmitere in prima treapta a cutiei de viteze;
i0 = raportul de transmitere a transmisiei principale .
Din conditia de autopropulsare ![]() se obtine :
se obtine : ![]() unde :
unde :
FR max este forta la roata necesara calculata pentru regimul de deplasare cu acceleratia maxima.
FR max = 6465 N rezulta ca ![]()
Pentru ca forta la roata sa fie situata in domeniu trebuie ca :
FRmax ![]()
![]() sau
sau
![]() de unde:
de unde:
![]()
19,94![]() =37,5
=37,5
Unde Gad este greutatea aderenta si reprezinta greutatea ce revine puntii motoare la urcarea pantei maxime, in cazul automobilului cu punti motoare in spate Gad:
Gad= ;
;
Unde ![]() -coeficient de aderenta, se adopta
-coeficient de aderenta, se adopta ![]() =0,7
=0,7
Gad=![]()
Determinarea valorii minime a raportului de transmitere al transmisiei
Valoarea minima a raportului de transmitere a transmisiei este determinata din conditia cinematica de realizare a vitezei maxime de performanta, cand motorul functioneaza la turatia maxima. Raportul de transmitere i0 se realizeaza in puntea motoare, fie numai prin angrenajul conic, fie prin angrenajul conic si celelalte angrenaje de reducerea turatiei cu functionare permanenta montate in punte.
Calculul raportului de transmitere al transmisiei principale se realizeaza in conditiile de viteza maxima, in ultima treapta a cutiei de viteze, valoarea raportului i0 este data de relatia:
i0=![]()
unde ![]() =
=![]() rad/s
rad/s![]()
Determinarea numarului de trepte pentru cutia de viteze si a marimii rapoartelor de transmitere ale transmisiei
Pentru determinarea numarului de trepte se utilizeaza doua metode: o metoda grafica si o metoda analitica. Indiferent de metoda aleasa se fac unele ipoteze simplificatoare precum: schimbarea treptelor de viteza sa se faca instantaneu, astfel incat viteza maxima in treapta inferioara sa fie egala, cu viteza minima in treapta superioara. Metoda recomandata de literatura de specialitate este aceia a etajarii treptelor in progresie geometrica. Pentru calculul numarului de trepte se porneste de la principiul ca viteza maxima, intr-o treapta inferioara sa fie egal cu viteza minima intr-o treapta superioara, folosind relatia:
Va K=![]()
Cunoscand raportul de transmitere it max cit si it min se poate determina raportul de transmitere it min :
iCV 1 =![]() ;icv 1=
;icv 1=![]() =3.36
=3.36
In cazul etajarii cutiei de viteze in progresie geometrica, intre valoarea maxima i1 si minima in=1 in cutia de viteze sint necesare n trepte date de relatia:
n ; n
; n ; n
; n![]() ; n
; n![]() ;unde n
;unde n![]()
![]()
Se adopta n=4
Alegerea finala a marimii numarului de trepte se face tinandu-se cont de considerente constructiv functionale si de exploatare ale cutiei de viteze precum si de tipul si destinatia automobilului. Astfel pentru autovehicule de marfuri, la care importanta demarajului scade, aparand insa profilul mai greu al drumului, in scopul unei bune adaptabilitati se utilizeaza de obicei cutiile de viteze cu 5 trepte.
Fiind determinat numarul de trepte si tinand cont ca i=1, intr-o treapta K, raportul de transmitere este dat de relatia:
iCV k= ![]() ; (k=1.n)
; (k=1.n)
Tinand cont de tipul si destinatia autovehiculului, functionarea economica a automobilului presupune ca la astfel de regimuri de deplasare, motorul sa functioneze in zone cu consum favorabil, respectiv la turatia medie economica, astfel s-a introdus a cincea treapta econoama, calculata cu relatia:
icv5=![]() ; icv5=
; icv5=![]() ; icv5=0,86
; icv5=0,86
Pentru treapta a-I-a; icv1=7.65
Pentru treapta a-II-a; icv2=4.03
Pentru treapta a-III-a; icv3=2.26
Pentru treapta a-IV-a; icv4=1.42
Pentru treapta a-V-a; icv5=1
6 Evaluarea performantelor
Bilantul de tractiune si caracteristica fortei la roata
Performantele reprezinta posibilitatile maxime in privinta, capacitatii de autopropulsare, capacitatilor de sporire a vitezei, capacitatilor de franare si capacitatilor de functionare economica din punct de vedere al consumului de combustibil. Cu ajutorul acestor studii se stabilesc criteriile de calitate, prin care se apreciaza si se diferentiaza autovehiculele. Criteriile de apreciere ale performantelor dinamice se fac prin studii utilizand caracteristica puterilor, caracteristica de tractiune si caracteristica dinamica.
Caracteristica fortei la roata (Fr)
Pentru fiecare punct al caracteristicii externe de functionare a motorului, se poate calcula, la mersul in fiecare treapta a cutiei de viteze, atat forta la roata Fr, cat si viteza de deplasare a automobilului V. Forta la roata se calculeaza cu relatia:
Fr=![]() ;
;
Iar viteza de deplasare a automobilului este :
![]() ;
;
In care ![]() sunt viteze unghiulare ale rotii motoare si respectiv
a arborelui motorului.
sunt viteze unghiulare ale rotii motoare si respectiv
a arborelui motorului.
Prin caracteristica fortei la roata se defineste dependenta grafica dintre forta la roata si viteza de deplasare a automobilului. In cazul autovehiculului dat spre proiectare caracteristica fortei la roata, avand in vedere relatiile de mai sus arata astfel:
Caracteristica fortei la roata serveste pentru calculul caracteristicii dinamice. Pentru o singura treapta de viteze caracteristica fortei la roata este prezentata in continuare:
Pentru studiul performantelor automobilului la deplasarea pe un anumit drum caracterizat de o inclinare longitudinala si de un coeficient de rezistenta la rulare f, caracteristica se completeaza cu bilantul de tractiune dat de relatia:
FR = Rr + Rp + Rd + Ra
Pentru rezolvarea problemelor legate de dinamicitatea automobilului se propune reprezentarea bilantului de tractiune sub forma:
FR - Ra = Rr + Rp+ Rd
Membrul stang al acestei relatii reprezinta forta excedentara care poate fi folosita la invingerea rezistentei drumului si la accelerarea automobilului.
Calculul sub forma tabelara a valorilor vitezei in cadrul treptei considerate este reprezentat in tabelul urmator.
Relatiile de utilizare la construirea acestui tabel sunt mentionate anterior, iar rapoartele de transmitere ale transmisiei automobilului sunt:
Pentru treapta a- I -a: icv1= 7.65
Pentru treapta a- II -a: icv1= 4.03
Pentru treapta a- III -a: icv1= 2.26
Pentru treapta a- IV -a: icv1= 1.42
Pentru treapta a- V -a: icv1= 1
Bilantul de putere si caracteristica puterilor
Caracteristica puterilor
Caracteristica puterilor este reprezentarea grafica a bilantului de putere functie de viteza automobilului, pentru toate treptele de viteze. Bilantul de putere al automobilului reprezinta echilibrul dinamic puterea la roata PR si suma puterilor necesare invingerii rezistentelor la inaintare, respectiv rezistenta la rulare ( Pr ), rezistenta la urcarea pantei ( Pp ), rezistenta la demarare ( Rd ) si rezistenta aerului ( Pa ), dat de relatia :
PR =P*![]() =Pr+ Pa+ Pp+Pd
=Pr+ Pa+ Pp+Pd
unde ;
P- puterea motorului
![]() - randamentul transmisiei
- randamentul transmisiei
In cazul autovehiculului dat spre proiectare, avand cinci rapoarte de transmitere ale cutiei de viteze de mers inainte, reprezentarea grafica a caracteristicii puterilor in coordonate putere-viteza arata astfel:
Relatiile de calcul pentru marimile din componenta tabelelor urmatoare sunt:
Pr=![]() Pp =
Pp = ![]() ;
;
Pa=![]() PR =
PR = ![]() ;
;
Deoarece studiul performantelor automobilului se face de obicei in functie de deplasarea cu viteze constante, pe o cale orizontala in stare buna se noteaza cu puterea consumata pentru invingerea rezistentei la rulare pe o cale orizontala buna considerata cu un coeficient al rezistentei la rulare f = ct. pentru viteze uzuale.
Unde Pro =Ga * f *v.
Bilantul de putere va fi de forma:
P = PR - (Pro + Pa) = Pex.
Pex - este o putere numita excedentara fata de deplasarea cu viteza constanta pe o cale data.
Aceasta putere este utilizata de automobil in scopul sporirii vitezei maxime, invingerea rezistentelor maxime ale caii de rulare, sporirea vitezei si invingerea rezistentelor caii.
Puterea utilizata la deplasarea cu viteza constanta pe o cale orizontala este numita Prez si se manifesta in orice conditii (pentru invingerea rezistentei aerului si a rezistentei la rulare apare un consum permanent de putere).
Studiul performantelor dinamice cu ajutorul caracteristicii puterilor se face functie de modul de utilizare a puterii disponibile.
Pentru o reprezentare grafica s-a folosit expresia bilantului de putere dat de relatia:
PR = P*![]() =Pr + Pa + Pp + Pd
data sub forma
=Pr + Pa + Pp + Pd
data sub forma
Pex = Pd +![]() = PR - Prez unde
= PR - Prez unde
Prez = Pa + Pro si ![]()
f - coeficient al rezistentei de rulare
Acceleratia automobilului si caracteristica acceleratiilor
Din ecuatia de definitie a factorului dinamic, se poate deduce expresia acceleratiei de miscare a automobilului:
![]() , pentru fiecare treapta.
, pentru fiecare treapta.
Valorile acceleratiei vor depinde de drumul pe care ruleaza
automobilul, caracterizat prin rezistenta specifica "![]() ", de regula demarajul automobilului se studiaza la deplasarea pe drum orizontal
astfel
", de regula demarajul automobilului se studiaza la deplasarea pe drum orizontal
astfel ![]() =f.
=f.
Caracteristica acceleratiilor reprezinta dependenta grafica dintre acceleratia automobilului masurata in m/s2, si viteza de deplasare a automobilului va.
Relatiile utilizate la construirea acestui tabel sunt cele mentionate anterior, iar rapoartele de transmitere ale transmisie autobehiculului sunt
Pentru treapta a- I -a: icv1= 7.65
Pentru treapta a- II -a: icv1= 4.03
Pentru treapta a- III -a: icv1= 2.26
Pentru treapta a- IV -a: icv1= 1.42
Pentru treapta a- V -a: icv1= 1
Timpul si spatiul de demarare
Studiul demararii automobilului presupune determinarea acceleratiei, a timpului si spatiului de demarare, precum si a indicilor cu ajutorul carora se poate aprecia capacitatea de sporirea a vitezei.
Acceleratia automobilului caracterizeaza in general calitatile lui de demarare, deoarece in conditii egale, cu cat acceleratia este mai mare cu atat creste viteza medie de exploatare.
Pentru determinarea acceleratiei, precum si pentru studiul performantelor de demarare se considera se considera autovehiculul in miscare rectilinie, pe o cale orizontala, in stare buna cu un coeficient mediu al rezistentei la rulare f.
In aceste conditii, expresia bilantului de putere, puterea excedentara Pex va fi utilizata numai pentru accelerare, si este data de relatia :
![]() de unde rezulta
de unde rezulta ![]()
Utilizand relatiile se traseaza graficul caracteristicii de demaraj.
Determinarea timpului de demarare
Prin timp de demarare se intelege timpul necesar de crestere a vitezei automobilului intre viteza minima in treapta intai a cutiei de viteze si viteza maxima de deplasare in ultima treapta, facand ipotezele ca motorul functioneaza pe caracteristica externa si ca schimbarea treptelor se face instantaneu.
Pentru calculul timpului de demaraj se porneste de la definitia acceleratiei:
a=![]()
De unde se deduce expresia timpului elementar:
![]() ;
;
Intrucat pentru acceleratie nu exista o functie analitica de variatie in raport cu viteza, se recurge prin integrare, la diagrama acceleratiei. La viteza maxima a automobilului, acceleratia fiind nula, inversul acceleratiei va fi infinit. Astfel expresia timpului de demaraj va fi:
 ;
;
Pentru calcularea timpului de demaraj este necesara calcularea inversului acceleratiei. Deoarece inversul acceleratiei tinde la infinit pentru viteza care tinde la viteza maxima, acesta se calculeaza pentru o valoare egala cu 0,9 din viteza maxima.
Inlocuind in relatie se calculeaza timpul de demaraj, necesar atingerii vitezei de 100 km/h (in treapta a IV a, a cutiei de viteze) , pentru un drum orizontal cu f=0,02, si sarcina maxima Ga=20000 N.
Spatiul de demarare
Prin spatiului de demaraj se intelege distanta parcursa de automobil in timpul demarajului.
Pentru calculul spatiului de demaraj se foloseste relatia de definitie a vitezei:
v=![]() ;
;
de unde se deduce expresia spatiului elementar:
ds=![]() ,
,
Din relatia de mai sus se observa cunoasterii functiei de dependenta a vitezei fata de timp. Astfel timpul necesar pentru demaraj de la viteza vmin1 la viteza v1 este:
t1=![]() ;
;
Daca intr-un sistem de axe se i-a in abscisa vitezele de demaraj, iar in ordonata timpul necesar de demaraj pentru fiecare viteza, rezulta reprezentarea grafica a functiei v=v(t). Spatiul, de demaraj total Sd se exprima prin relatia:

Graficul functiei determinate este prezentat in continuare:
|
v1 |
P |
Pr |
pr |
Pp |
Pa |
Pf |
|
1.712614 |
5.095 |
4.73835 |
0.218358 |
3.754049 |
0.001924 |
3.972408 |
|
2.446591 |
7.7319 |
7.190667 |
0.31194 |
5.362928 |
0.00561 |
5.674868 |
|
3.669887 |
12.4984 |
11.62351 |
0.467911 |
8.044391 |
0.018935 |
8.512302 |
|
4.893182 |
17.4781 |
16.25463 |
0.623881 |
10.72586 |
0.044883 |
11.34974 |
|
6.116478 |
22.3802 |
20.81359 |
0.779851 |
13.40732 |
0.087663 |
14.18717 |
|
6.850455 |
25.1635 |
23.40206 |
0.873433 |
15.0162 |
0.12316 |
15.88963 |
|
7.339773 |
26.9144 |
25.03039 |
0.935821 |
16.08878 |
0.151482 |
17.0246 |
|
8.563069 |
30.79 |
28.6347 |
1.091791 |
18.77025 |
0.240547 |
19.86204 |
|
9.786364 |
33.7166 |
31.35644 |
1.247761 |
21.45171 |
0.359068 |
22.69947 |
|
11.00966 |
35.4036 |
32.92535 |
1.403732 |
24.13317 |
0.511251 |
25.53691 |
|
11.74364 |
35.7 |
33.201 |
1.497314 |
25.74205 |
0.620469 |
27.23937 |
|
12.23296 |
35.5605 |
33.07127 |
1.559702 |
26.81464 |
0.701304 |
28.37434 |
|
13.45625 |
33.8967 |
31.52393 |
1.715672 |
29.4961 |
0.933436 |
31.21177 |
Caracteristica puterilor ce
actioneaza asupra rotii,atunci cind autovehicolul se afla
in treapta a 2 a a cutiei de viteze, s-a realizat cu ajutorul programului
Excel,si este prezentata in imaginea urmatoare:
|
v2 |
P |
Pr |
pr |
Pp |
Pa |
Pf |
|||
|
2.469348 |
5.095 |
4.73835 |
0.314842 |
5.412811 |
0.005768 |
5.727653 |
|||
|
3.52764 |
7.7319 |
7.190667 |
0.449774 |
7.732587 |
0.016818 |
8.182361 |
|||
|
5.29146 |
12.4984 |
11.62351 |
0.674661 |
11.59888 |
0.05676 |
12.27354 |
|||
|
7.05528 |
17.4781 |
16.25463 |
0.899548 |
15.46517 |
0.134541 |
16.36472 |
|||
|
8.8191 |
22.3802 |
20.81359 |
1.124435 |
19.33147 |
0.262776 |
20.4559 |
|||
|
9.877393 |
25.1635 |
23.40206 |
1.259368 |
21.65124 |
0.369181 |
22.91061 |
|||
|
10.58292 |
26.9144 |
25.03039 |
1.349322 |
23.19776 |
0.454076 |
24.54708 |
|||
|
12.34674 |
30.79 |
28.6347 |
1.574209 |
27.06406 |
0.721056 |
28.63826 |
|||
|
14.11056 |
33.7166 |
31.35644 |
1.799096 |
30.93035 |
1.076329 |
32.72945 |
|||
|
15.87438 |
35.4036 |
32.92535 |
2.023984 |
34.79664 |
1.532507 |
36.82063 |
|||
|
16.93267 |
35.7 |
33.201 |
2.158916 |
37.11642 |
1.859896 |
39.27533 |
|||
|
17.6382 |
35.5605 |
33.07127 |
2.248871 |
38.66294 |
2.102205 |
40.91181 |
|||
|
|
33.8967 |
31.52393 |
2.473758 |
42.52923 |
2.798035 |
45.00299 |
In continuare se va determina graficul puterilor ce apar ,atunci cind este cuplata treapta a 3 a , a cutiei de viteze:
|
V3 |
P |
Pr |
pr |
Pp |
Pa |
Pf |
|||
|
3.55726 |
5.095 |
4.73835 |
0.453551 |
7.797513 |
0.017245 |
8.251064 |
|||
|
5.081799 |
7.7319 |
7.190667 |
0.647929 |
11.1393 |
0.050276 |
11.78723 |
|||
|
7.622699 |
12.4984 |
11.62351 |
0.971894 |
16.70896 |
0.169683 |
17.68085 |
|||
|
10.1636 |
17.4781 |
16.25463 |
1.295859 |
22.27861 |
0.402212 |
23.57447 |
|||
|
12.7045 |
22.3802 |
20.81359 |
1.619824 |
27.84826 |
0.78557 |
29.46808 |
|||
|
14.22904 |
25.1635 |
23.40206 |
1.814202 |
31.19005 |
1.103669 |
33.00425 |
|||
|
15.2454 |
26.9144 |
25.03039 |
1.943788 |
33.41791 |
1.357464 |
35.3617 |
|||
|
17.7863 |
30.79 |
28.6347 |
2.267753 |
38.98756 |
2.155603 |
41.25532 |
|||
|
20.3272 |
33.7166 |
31.35644 |
2.591718 |
44.55722 |
3.217693 |
47.14893 |
|||
|
22.8681 |
35.4036 |
32.92535 |
2.915682 |
50.12687 |
4.581442 |
53.04255 |
|||
|
24.39264 |
35.7 |
33.201 |
3.110061 |
53.46866 |
5.560174 |
56.57872 |
|||
|
25.409 |
35.5605 |
33.07127 |
3.239647 |
55.69652 |
6.284557 |
58.93617 |
|||
|
|
33.8967 |
31.52393 |
3.563612 |
61.26617 |
8.364746 |
64.82978 |
In continuare se va prezenta graficul,pentru caracteristica de putere in trepta a 4 a,impreuna cu listingul aferent,realizat cu ajutorul programului Excel.
|
v4 |
P |
Pr |
pr |
Pp |
Pa |
Pf |
|||
|
5.126367 |
5.095 |
4.73835 |
0.653612 |
11.237 |
0.051611 |
11.89061 |
|||
|
7.323381 |
7.7319 |
7.190667 |
0.933731 |
16.05285 |
0.150469 |
16.98658 |
|||
|
10.98507 |
12.4984 |
11.62351 |
1.400597 |
24.07928 |
0.507833 |
25.47987 |
|||
|
14.64676 |
17.4781 |
16.25463 |
1.867462 |
32.1057 |
1.203752 |
33.97316 |
|||
|
18.30845 |
22.3802 |
20.81359 |
2.334328 |
40.13213 |
2.351078 |
42.46646 |
|||
|
20.50547 |
25.1635 |
23.40206 |
2.614447 |
44.94798 |
3.303096 |
47.56243 |
|||
|
21.97014 |
26.9144 |
25.03039 |
2.801193 |
48.15855 |
4.062663 |
50.95975 |
|||
|
25.63183 |
30.79 |
28.6347 |
3.268059 |
56.18498 |
6.451359 |
59.45304 |
|||
|
29.29352 |
33.7166 |
31.35644 |
3.734924 |
64.2114 |
9.630016 |
67.94633 |
|||
|
32.95521 |
35.4036 |
32.92535 |
4.20179 |
72.23783 |
13.71149 |
76.43962 |
|||
|
35.15223 |
35.7 |
33.201 |
4.481909 |
77.05369 |
16.64067 |
81.5356 |
|||
|
36.61691 |
35.5605 |
33.07127 |
4.668655 |
80.26426 |
18.80863 |
84.93291 |
|||
|
|
33.8967 |
31.52393 |
5.135521 |
88.29068 |
25.03428 |
93.4262 |
.7 Performantele autovehiculului
Ecuatia generala de miscare
Se determina tinandu-se seama de o parte de fortele de propulsie si de fortele de rezistenta care se opun deplasarii rectilinii a autovehiculului pe un drum cu inclinare longitudinal si in regim de demarare
Se porneste de la ecuatia de tractiune
FR = RP +Ra + Rr +Rd
FR = ![]()
Notam ![]() = RP +Ra + Rr
= RP +Ra + Rr
![]()
![]()
Ecuatia generala de miscare are forma :
![]()
In cazul autovehiculelor cu transmisie mecanica . forta la roata variaza in functie de momentul motor potrivit relatiei :
FR = ![]()
it -raportul de transitere total in treapta de viteza aleasa
it = ![]()
FR = ![]()
i - momentul de inertia mecanic al pieselor motorului in miscare de rotatie
a) Deplasarea pe panta maxima
![]() ; Ra
se micsoreaza rezulta FR =
; Ra
se micsoreaza rezulta FR = ![]()
![]()
b) Demarajul in treapta I cu acceleratie maxima corespunzatoare pornirii de pe loc pe calea orizontala
![]() ;
; ![]() ;
; ![]() ; Ra se neglijeaza
; Ra se neglijeaza
FRmax = ![]()
c) Deplasarea cu viteza maxima V = Vmax ; ![]() ; pe cale orizontala
; pe cale orizontala ![]() ;
; ![]() ; Rp = 0
; Rp = 0
![]()
Determinarea factorului dinamic si a caracteristicii dinamice
FR - R0 = G0 repreyinta forta de tractiune
disponibila excedentara si se utilizeaza la invingerea
rezistentelor drumului si rezistentei la demarare .
repreyinta forta de tractiune
disponibila excedentara si se utilizeaza la invingerea
rezistentelor drumului si rezistentei la demarare .
Pentru compararea performantelor dinamice ale unor autovehicule de greutate si sarcini diferie se foloseste un parametru adimensional ce se numeste factor dinamic care reprezinta raportul dintre forta de tractiune excedentara Fex si greutatea totala a autovehiculului Ga .
D = ![]()
Daca autovehicolul se deplaseaya cu viteze constante factorul D va fi egal cu coeficientul rezistentei totale a drumului adica :
D = ![]()
Notam D pentru priza directa
D = ![]()
Dk = Dik +
Folosind curbele de variatie ale factioruluii dinamic toate treptele din cutia de viteza se obtine caracteristica dinamica a autovehiculului
Limitarea de catre aderenta a factorului dinamic
Rularea autovehiculului este posibila daca:
a Ri FR j Z rm, unde :
a Ri - suma tuturor rezistentelor la puntea motoare
FR - forta motoare la roata
j - coeficient de aderenta
Valoarea maxima a fortei la roata este limitata de alunecarea rotilor pe suprafata drumului si atunci limita ei superioara este.
FR max jZ m
Factorul dinamic limita va fi:
Dj ![]()
Avand in vedere ca
patinarea apare atunci viteza este prea mica , putem sa neglijam
ternemul kxAxV2 ,
factorul dinamic devine : Ra
![]()
Inbunatatirea performantelor autovehiculelor se obtine prin cresterea factorului dinamic ce se pote realiza in marimea raportului de transmitere principala prin reducerea greutatii proprii prin construirea unor caroserii mai aerodinamice .
Determinarea parametrilor capacitatii de demarare ai autovehiculului
Determinarea acceleratiilor
Pentru determinarea acceleratiilor se considera automobilul in mitcare rectilinie pe o vale orizontala in stare buna, cu un coeficient mediu al rezistentei la rulare, f.
Deci, puterea excedentara Pex va fi utilizata in acest caz numai pentru accelerare.
y = f cosa + sin a
a
= 0 ![]() T y
= f = 0.022
T y
= f = 0.022
D = y + ![]()
![]() T a=
T a=
![]() , ( D - y
, ( D - y ![]() , unde:
, unde:
dk- coeficient de influenta a maselor aflate in miscare de rotatie
a![]() = (D
= (D ![]() - y
- y ![]() ; D =
; D = 
Utilizand graficul factorului dinamic functie de vitezele de deplasare, se pot studia o serie de performante:
a) viteza maxima
Trasand o dreapta paralela cu abscisa la ordonata D = y, intersectia ai cu curba factorului dinamic da pe abscisa vitzeza maxima.
b) pana maxima
Panta maxima pe care o poate urca automobilul cu o viteza data la o anumita treapta a cutiei de viteze se determina astfel :
D = f cos a + sin a f + h [%]
h = D- f [%]
h - inaltimea pantei in procente
c) rezistenta totala maxima
Trasand o dreapta paralela cu ordonata, intersectia ei cu factorul dinamic da pe ordonata rezistenta maxima pe care o invinge la o viteza oarecare.
ak = (D k y ![]()
d k = 1+ s i2cvk
s = 0.04/0.09
Adopt s = 0.065
Determinarea timpului de demarare
Timpul de demarare reprezinta timpul necesar de crestere a vitezei autovehiculului intre viteza minima in treapta I a cutiei de viteze si viteza maxima in ultima treapta. ( Vn =0,9 Vmax ) cu conditia ca motorul sa functioneze pe caracteristica exterioara si ca schimbarea treptei sa se faca instantaneu. Integrand ecuatia acceleratiei se obtine:
a = ![]()
D ![]()
a -scara inversa acceleratiei
b-scara inversa a vitezei
D = ![]()
Vm = 0,9 xVmax
= 0,9 ![]() = 37,5
= 37,5
Td = ![]()
In practica se traseaza graficul inverselor acceleratiei se imparte in trapeze mici si se calculaeza timpul de demararre dupac are se traseaza timpii de demarare functie d viteza intr-un alt grafic .
Determinarea graficului de demarare
Spatiul de demarare parcurs in timpul de demarare
Ds = Vdt = ![]()
Se realizeaza integrarea grafica
DA = VDtxbk
b, k -scarile vitezei si ai timpului de demarare
Determinarea parametrilor capacitatii de franare aui autovehiculului
determinarea acceleratiilor
Dupa directia de miscare
Fi - (x1
+x2 ) - Ga sin![]() -Ra = 0
-Ra = 0
![]()
af = ![]()
deceleratia este maxima atunci cand FR este maxim
FfRmax = G0
(![]()
Afmax = ![]()
Determinarea spatiului de franare
Franarea este procesul prin care se reduce partial sau total viteza automobilului. Ea se realizeaza prin generarea in mecanismele de franare a unei forte de franare la roti, indreptata dupa directia vitezei autovehiculului, dar de sens opus ei.
Sft= SfmxSfs
Sfm = - ![]()
Daca franarea se face pe un teren oriyontal p= 0 si motorul este decuplat avem
![]()
Determinarea timpului de franare
Timpul de franare minim se detremina pornind de la relatia :

Daca franarea se face pana la oprire
Vf = pe un drum orizontal cu
deplasarea max f , p = 0 ; tfmin = ![]()
Repartizarea fortelor de franare pe puntile autovehiculului
Relatiile obtinute pentru spatiul si timpul de franare se refera la un autovehicul la care exista o repartitie ideala a fortei de franare respectiv deceleratia relativa afrel realizata pe fiecare punte are aceiasi marime. In realitate, acest lucru se intampla numai in anumite conditii care depind de repartitia fortei de franare e puni, de marimea coeficientului de aderenta de constructia franelor, de starea pneurilor si de gradul de incarcare al autovehiculului
Repartizarea fortelor de franare pe puntile autovehiculului areo importanta deosebita, intrucat prin ea se determina capacitatea de franare si comportarea in timpul franarii pe diferite tipuri de drumuri.
Deca la franare se impune realizarea unei deceleratii relative d f , relatiile de mai sus devin :
Z1 = G1 + Ga hg /L d f iar Ff1= d f Z1
Z2 = G2 - Ga hg /L d f Ff2= d f Z2
Repartizarea ideala a fortelor de franare pe puntile autovehiculului se obtine atunci cand raportul dintre forta de franare si sarcina pe punte este aceeasi indiferent de acceleratie sau coeficient de aderenta si est data de relatia:
Ff1/ Ff2= Z1/ Z2 = l
pentru puntea fata: l1 = Ff1/Z1 = Ff1/ G1 + Ga hg /L d f
pentru puntea spate: l2 = Ff2/Z2 = Ff2/G2 - Ga hg /L d f
Daca l1<l2 , atunci rotile puntii spate se blocheaza inaintea rotilor puntii fata.
Daca l1 l2 , atunci rotile puntii spate si puntii fata se blocheaza simultan.
Daca l1>l2 , atunci rotile puntii fata se blocheaza inaintea rotilor puntii spate.
8. Consumul de combustibil
Definirea parametrilor consumului de combustibil
Functionarea economica a motorului se apreciaza dupa consumul de combustibil orar, Qh, si dupa consumul specific de combustibil. Consumul orar reprezinta cantitatea de combustibil consumata de un motor in timp de o ora si este exprimat in kg/h, iar consumul specific este cantitatea de combustibil in grame necesara unui motor pentru a obtine un kW din puterea sa timp de o ora, la un anumit regim de functionare.
Intre consumul orar si consumul specific si puterea efectiva a motorului exista relatia:
![]() (
(
Pentru a ilustra influenta pe care o au caracteristicile autovehiculului si conditiile de exploatare asupra consumului de combustibil, s-a stabilit ca parametru pentru autovehicul, cantitatea de combustibil, in kg sau litri consumati la 100 km parcursi. Deoarece capacitatea rezervoarelor este data in litri, se utilizeaza mai frecvent cantitatea de combustibil in litri consumati la 100 km parcursi.
Daca deplasarea se face cu viteza v [km/h] legatura dintre parametrii autovehiculului si ai motorului este data de relatia:
![]()
sau:
![]()
unde:
g [kg/m3] : densitatea sau masa volumica a combustibilului.
Functie de consumul specific de combustibil relatiile anterioare capata formele:
![]()
sau:
![]()
Calculul consumului de combustibil
Valorile calculate sunt prezentate in tabelele V.1, V.2 si reprezentate in figura V.1.
Tabelul V.1. Consumul de combustibil
n [rot/min] Qh
100% [kg/100km] Qh 85% [kg/100km] Qh 70% [kg/100km] Qh 55% [kg/100km] Qh 40% [kg/100km] Qh 25% [kg/100km] 800 2.042659 1.536093 1.092876 0.716087 0.409793 0.179833 1000 2.69082 2.02396 1.440279 0.943884 0.540198 0.237008 1200 3.372329 2.536457 1.804785 1.182505 0.676472 0.296516 1400 4.07925 3.067471 2.181928 1.428939 0.816835 0.357548 1600 4.805038 3.61201 2.568107 1.680795 0.959907 0.419505 1800 5.544377 4.166061 2.960464 1.93621 1.104642 0.481948 2000 6.29302 4.726456 3.356777 2.193763 1.250261 0.544567 2200 7.047626 5.290732 3.755343 2.452386 1.396191 0.60713 2400 7.805598 5.856996 4.154868 2.711271 1.541998 0.669452 2600 8.56492 6.423784 4.554351 2.969788 1.687322 0.731349 2800 9.324 6.989926 4.95297 3.227389 1.831814 0.792601 3000 10.0815 7.554409 5.349973 3.483521 1.97507 0.852906 3200 10.83619 8.116237 5.74456 3.737543 2.116566 0.911847 3400 11.58676 8.674295 6.135774 3.988626 2.255596 0.968846 3600 12.33168 9.227211 6.522383 4.235673 2.391203 1.023126 3800 13.06904 9.77322 6.902772 4.477228 2.522117 1.073669 4000 13.79636 10.31002 7.274824 4.711384 2.64669 1.119178 4200 14.51048 10.83465 7.635813 4.935696 2.76283 1.158033 4400 15.20732 11.34334 7.982286 5.147093 2.867939 1.188254 4450 15.37827 11.46749 8.066153 5.197498 2.892135 1.194191 4500 15.54773 11.59027 8.148773 5.246796 2.91539 1.199399 4550 15.71561 11.71159 8.230067 5.294917 2.937647 1.203837 4600 15.88182 11.83136 8.30995 5.341789 2.958846 1.207459 4650 16.04624 11.94948 8.388336 5.387334 2.978922 1.210218 4700 16.20877 12.06585 8.465131 5.431472 2.997809 1.212066 4750 16.36929 12.18037 8.54024 5.47412 3.01544 1.212952 4800 16.52767 12.29291 8.613563 5.51519 3.031741 1.212823 5000 17.13724 12.72098 8.886814 5.66181 3.082114 1.20104 5200 17.70136 13.10719 9.122216 5.77518 3.104688 1.168277 5400 18.20918 13.44166 9.31099 5.847758 3.093356 1.110141 5600 18.648 13.71289 9.442951 5.870843 3.041111 1.021633 5800 19.00313 13.90761 9.506397 5.834483 2.939989 0.897109 6000 19.25769 14.01064 9.487992 5.727386 2.780999 0.730243 6200 19.39249 14.00475 9.372658 5.536833 2.554061 0.51398 6400 19.38584 13.87053 9.143457 5.248588 2.247937 0.2405 6500 19.32197 13.74861 8.980328 5.062946 2.061337 0.079641
Tabelul V.2. Consumul de combustibil
Parametrii
rezistentei totale a drumului a=00 a=0,50 a=10 a=20 v
[km/h] v
[km/h] v
[km/h] v
[km/h] 170.1818 13.35732 166.2546 13.72952 162.3273 14.05475 153.1636 14.65323 162.3273 10.31708 158.4 10.69715 153.1636 10.86807 142.6909 11.27358 153.1636 7.507506 147.9273 7.692363 142.6909 7.890972 129.6 8.070597 141.3818 4.977015 134.8364 5.061422 128.2909 5.169405 112.5818 5.299289 126.9818 2.906859 119.1273 2.954918 109.9636 2.973819 20.94546 2.418779 106.0364 1.281124 94.25455 1.278969 79.85455 1.27952 20.94546 1.494435
![]()
![]()
![]()
![]()
Consumul de combustibil
9 Stabilitatea autovehiculului
Capacitatea autovehiculului in mers ramine in permanenta pe toate rotole . iar stabilitatea dispare atunci cand in timpul rularii apar alunacari in directii longitudinale sau transvrersale . Alunacarile nu sunt l afel de periculoase ca rasturnarile ce se prefer[ la aparitia alunecarii inaintea rasturnarii .
Pierderea stabilitatii apare datorita fortelor ce actioneza asupra autoturismului : forta de tractiune , forta de franare , fortele laterale , centrifugale in viraj , actiunea vantului puternic din partea laterala .
Stabilitatea autovehiculului la urcare si la coborarea cailor de rulare cu inclinari longitudinale mari .
Determinarea unghiurilor limita de rasturnare siderapare indirecstie longitudinala
la urcare
Z1 x L+R0 x
h0 +Rd x h x g + G0
x h x g x sin![]() + Mrul + Mrul1
- G0 b x cos
+ Mrul + Mrul1
- G0 b x cos![]() = 0
= 0
Rasturnarea arem loc atunci cand :
Z1 x L+R0 x
h0 +Rd x h x g + G0
x h x g x sin![]() + Mrul + Mrul1
> G0 b x cos
+ Mrul + Mrul1
> G0 b x cos![]()
Valoarea unghiului pantei maxime la carea poate avea loc rasturnarea este :
tg![]() r
r![]()
Conditia de dtabilitate la rasturnere pe panta longitudinala fara ca mai inainte sa apara alunecarea longitudinala este deta de relatia :
tg![]() r
r![]()
Determinarea conditiei de derapare sa aiba loc inaintea rasturnarii
Piederea stabilitatii se face prin alunacarea rotilor
G0 sin ![]() +Rd + Ra > x1 -x2
+Rd + Ra > x1 -x2
![]() x1 =
x1 = ![]()
G0 sin ![]() +Rd + Ra >
+Rd + Ra > ![]() -
- ![]()
x2
= ![]()
Z1
= ![]()
![]()
![]()
![]()
unghiul la care are loc patinarea
Deci la autovehiculele cu partea motoare fata rasturnarea in jurul puntii din spate nu este posibila deoarece la orice valoare a coeficientului de aderenta inainte de aincepe rasturnarea apare patinarea rotilor :
La coborare :
Z2 x L + G0 x h x g x
sin![]() = 0
= 0
R0 x h0 +Rd x
h x g + G0 x cos![]() + Mrul + Mrul1
+ Mrul + Mrul1
La rasturnare Z2 = 0
tg![]() >
> ![]()
![]()
![]()
unghiul limita de alunecare la franare
la urcare
![]()
Determinarea vitezei critice de rasturnare in directia longitudinala la rularea pe cai orizontale
pericolul rasturnarii
longitudinale , in raport cu puntea din spate , este posibil sa apara
l aautotuirsmele de aport si de curse cind se deplaseaza cu voteze
foatrte mari pe cai orizontale (![]() = 0 ). Astfel cresterea excesiva a rezistentei aerului produce o
descarcare dinamica a puntii din fata . Viteza fiind
aproape maxima , rezistenta la demarare este nula, iar rezisrenta
la rulare se neglijeaza :
= 0 ). Astfel cresterea excesiva a rezistentei aerului produce o
descarcare dinamica a puntii din fata . Viteza fiind
aproape maxima , rezistenta la demarare este nula, iar rezisrenta
la rulare se neglijeaza :
r0h0 = G0 b ; R*A*V2*h*g = G0*b
Ver = ![]()
Ver = ![]()
Deoarece viteza maxima pe care o atinge autovehicolul de proiectat este dee150 km/h nu exista riscul rasturnarii la viteza critica .
Stabilitate transversala
Determinarea fortelor care actionaeza la mersul in viraj in cazul unei miscairi curbilinii ct. V = ct. , R = ct.
Piederea stabilitarttii transversale a autovehicolului se manifesta prin derapare sau rasturnare laterala si se produce in viraje datorita aactiunii fortei laterale si se produce in viraje datorita actiuni fortelor centrifuge pe drumuri inclinate transversal , pe drumuri in curba precum si la actiunea vantului .
Daca se constata ca
autovhicolul in miscar accelerata curbilinie si cu variatia
unghiului de virare ![]() componenta fortei
pe cel e 2 axe x si z si momentul de inartei , care apar , sunt
exprimate aprin :
componenta fortei
pe cel e 2 axe x si z si momentul de inartei , care apar , sunt
exprimate aprin :
Fix = ma ![]()
Fiy = ma ![]()
Miy = ma
![]()
Unde ![]() - acceleratia
liniara a punctului B al puntii din spate
- acceleratia
liniara a punctului B al puntii din spate
![]() - viteya unghiulara in jurul centrului instantaneu de
rotatie
- viteya unghiulara in jurul centrului instantaneu de
rotatie
![]() - accelerati unghiulara
- accelerati unghiulara
R - raya de viraj al punctului central B al puntii din spate
Ioz - momentul de inaitare al masinii in aport cu xoy normala la ea si trecand prin centrul de greutate Cg
![]() - raya de giratie a masei masinii in raport cu axa
z
- raya de giratie a masei masinii in raport cu axa
z
![]()
R = ![]() raza de viraj
raza de viraj
![]() -viteza
unghiulara
-viteza
unghiulara
![]()
Fix = ma 
Fiy = ma 
Fiy = ma Pz2 ![]()
Daca miscarea este uniform variata , curbilinie cu raya de viraj ct. Saatuncp :
Fix = ma consideram R = 10
m
Fix =- ma 
Fiy = ma 
Miz = 0
determinarea viteyelor la rasturnare
si de derapare pentru ![]() = 0 si
= 0 si ![]()
1) Pentru ![]() = 0
= 0
a) viteza limita de rasturnare :
vr > 
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Analize pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||